Nature Machine Intelligence ( IF 23.8 ) Pub Date : 2019-12-10 , DOI: 10.1038/s42256-019-0125-1 Stefano Mintchev , Marco Salerno , Alexandre Cherpillod , Simone Scaduto , Jamie Paik
|
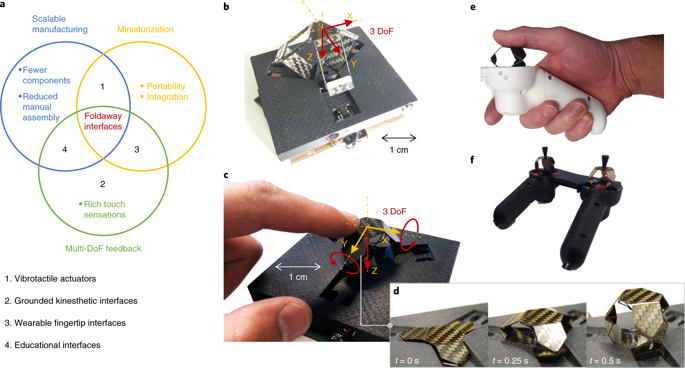
Haptic interfaces can recreate the experience of touch and are necessary to improve human–robot interactions. However, at present, haptic interfaces are either electromechanical devices eliciting very limited touch sensations or devices that may provide more comprehensive kinesthetic cues but at the cost of their large volume: there is a clear trade-off between the richness of feedback and the device size. The design and manufacturing challenges in creating complex touch sensations from compact platforms still need to be solved. To overcome the physical limitation of miniaturizing force feedback robots, we adapted origami design principles to achieve portability, accuracy and scalable manufacturing. The result is Foldaway, a foldable origami robot that can render three-degrees-of-freedom force feedback in a compact platform that can fit in a pocket. This robotic platform can track the movement of the user’s fingers, apply a force of up to 2 newtons and render stiffness up to 1.2 newtons per millimetre. We experimented with different human–machine interactions to demonstrate the broad applicability of Foldaway prototypes: a portable interface for the haptic exploration of an anatomy atlas; a handheld joystick for interacting with virtual objects; and a bimanual controller for intuitive and safe teleoperation of drones.
中文翻译:
便携式三自由度力反馈折纸机器人,用于人机交互
触觉界面可以重现触摸体验,并且对于改善人机交互是必不可少的。但是,目前,触觉接口要么是引起非常有限的触摸感觉的机电设备,要么是可以提供更全面的运动感觉线索但以其大体积为代价的设备:在反馈的丰富性和设备尺寸之间存在明显的权衡取舍。从紧凑的平台创建复杂的触摸感的设计和制造挑战仍然需要解决。为了克服使力反馈机器人小型化的物理限制,我们采用了折纸设计原理以实现便携性,准确性和可扩展的制造。结果是Foldaway,一种可折叠的折纸机器人,该机器人可以在可放入口袋的紧凑型平台上提供三自由度的力反馈。该机器人平台可以跟踪用户手指的运动,施加最大2牛顿的力,并提供高达每毫米1.2牛顿的刚度。我们对不同的人机交互进行了实验,以展示Foldaway原型的广泛适用性:一种用于解剖学地图集的触觉探索的便携式界面;用于与虚拟对象进行交互的手持操纵杆;以及用于直观,安全地遥控无人机的双向控制器。我们对不同的人机交互进行了实验,以展示Foldaway原型的广泛适用性:一种用于解剖学地图集的触觉探索的便携式界面;用于与虚拟对象进行交互的手持操纵杆;以及用于直观,安全地遥控无人机的双向控制器。我们对不同的人机交互进行了实验,以展示Foldaway原型的广泛适用性:一种用于解剖学地图集的触觉探索的便携式界面;用于与虚拟对象进行交互的手持操纵杆;以及用于直观,安全地遥控无人机的双向控制器。

























 京公网安备 11010802027423号
京公网安备 11010802027423号