International Journal of Mechanical Sciences ( IF 7.3 ) Pub Date : 2023-03-10 , DOI: 10.1016/j.ijmecsci.2023.108279 Wei Xiao, Dean Hu, Hang Zhou, Xuenan Du
|
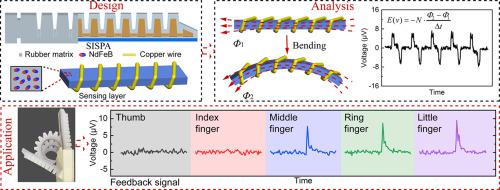
Many achievements for soft pneumatic actuators (SPAs) are made in the structure design and application demonstration. However, few studies focus on their mechanical sensing which is significant toward autonomous and intelligent soft robots. Herein, a self-sensing intelligent soft pneumatic actuator (SISPA) is developed by integrating a sensing layer that is silicone rubber/NdFeB composite twined with a varnished wire. The induced voltage is generated with the bending deformation of the sensing layer. Experimental results show that the induced voltage rises with the increasing mass fraction of magnetic powders, turns of the varnished wire, and thicknesses and widths of the composite. The bending deformation of the SISPA is also investigated experimentally and numerically. The bending angle of the SISPA reaches 225.5° with an applied pressure of 40 kPa, which is 92.68% of that of the SPA without embedding the sensing layer. The effect of the four parameters of the sensing layer on the bending deformation is investigated as well. In conclusion, the sensing layer has a slight effect on the bending deformation of the SISPA. Based on the experimental data, we find that there is a linear relationship between the bending angle and magnetic flux change. So the relation of the bending deformation and output voltage is formulated approximatively. Finally, an intelligent bionic hand is developed by utilizing the SISPA, which outputs different signals according to diverse gestures. Therefore, the proposed SISPA can be an attractive candidate involving accuracy control and intelligent soft robots.
中文翻译:
一种具有软磁结构的自感知智能软气动执行器
软气动执行器(SPA)在结构设计和应用示范方面取得了多项成果。然而,很少有研究关注其对自主和智能软机器人具有重要意义的机械传感。在此,通过集成硅橡胶/钕铁硼复合材料与漆包线缠绕的传感层,开发了一种自感知智能软气动执行器(SISPA)。感应电压是随着传感层的弯曲变形而产生的。实验结果表明,感应电压随着磁粉质量分数、漆包线匝数、复合材料厚度和宽度的增加而升高。还通过实验和数值研究了 SISPA 的弯曲变形。SISPA的弯曲角度达到225°。5°,施加压力为 40 kPa,是未嵌入传感层的 SPA 的 92.68%。还研究了传感层的四个参数对弯曲变形的影响。总之,传感层对 SISPA 的弯曲变形有轻微影响。根据实验数据,我们发现弯曲角度与磁通量变化之间存在线性关系。所以弯曲变形和输出电压的关系是近似的。最后,利用SISPA开发了智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。还研究了传感层的四个参数对弯曲变形的影响。总之,传感层对 SISPA 的弯曲变形有轻微影响。根据实验数据,我们发现弯曲角度与磁通量变化之间存在线性关系。所以弯曲变形和输出电压的关系是近似的。最后,利用SISPA开发了智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。还研究了传感层的四个参数对弯曲变形的影响。总之,传感层对 SISPA 的弯曲变形有轻微影响。根据实验数据,我们发现弯曲角度与磁通量变化之间存在线性关系。所以弯曲变形和输出电压的关系是近似的。最后,利用SISPA开发了智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。传感层对SISPA的弯曲变形有轻微影响。根据实验数据,我们发现弯曲角度与磁通量变化之间存在线性关系。所以弯曲变形和输出电压的关系是近似的。最后,利用SISPA开发了智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。传感层对SISPA的弯曲变形有轻微影响。根据实验数据,我们发现弯曲角度与磁通量变化之间存在线性关系。所以弯曲变形和输出电压的关系是近似的。最后,利用SISPA开发了智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。利用SISPA开发出智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。利用SISPA开发出智能仿生手,根据不同的手势输出不同的信号。因此,所提出的 SISPA 可以成为涉及精度控制和智能软机器人的有吸引力的候选者。
























 京公网安备 11010802027423号
京公网安备 11010802027423号