Precision Agriculture ( IF 6.2 ) Pub Date : 2022-12-22 , DOI: 10.1007/s11119-022-09980-6 Dongfang Li , Chengye Dong , Boliao Li , Yongwei Wang , Jun Wang
|
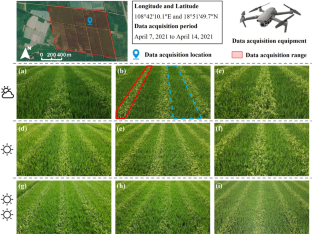
Hybrid rice row detection at the pollination stage is critical for the automation of in-field pollination agricultural vehicles. The parental crops of hybrid rice are planted at intervals in seed production fields with narrow inter-row spacing. During the advance of the pollination vehicle, in addition to the centerline of the crop row, information on the crop region boundaries is required to guide the vehicle and prevent it from running over the crop. For complete crop row detection, a novel machine vision-based method was presented to identify each of the individual regions of the crop rows, more than the centerlines, by line-shaped mask scanning combined with the vanishing point of the crop rows. The approach consisted of grayscale transformation, vanishing point detection, crop region identification, boundary position fine-tuning and crop region segmentation. Its region detection performance outperformed the convolutional neural network-based (CNN-based) methods with an intersection over union (IoU) of 0.832, an accuracy of 90.48%, a recall of 86.36%, a precision of 98.96% and an f1-Score of 92.23%. Its centerline extraction ability was compared with Hough Transform-based and SegNet-based methods on the basis of average lateral distance (ALD) between the ground truth line and the detected line. The proposed method resulted in an ALD of 1.943 pixels in a 640*360 resolution image, which was superior to the Hough Transform-based (5.704) and the SegNet-based (3.555) methods.
中文翻译:
基于消失点和线扫描法的杂交水稻授粉期行检测
授粉阶段的杂交水稻行检测对于田间授粉农用车的自动化至关重要。杂交水稻亲本作物在行距窄的制种田间隔种植。授粉车在前进过程中,除了作物行的中心线外,还需要作物区域边界信息来引导车辆,防止车辆碾过作物。对于完整的作物行检测,提出了一种新的基于机器视觉的方法,通过线形掩模扫描结合作物行的消失点来识别作物行的每个单独区域,而不是中心线。该方法包括灰度变换、消失点检测、作物区域识别、边界位置微调和裁剪区域分割。其区域检测性能优于基于卷积神经网络 (CNN-based) 的方法,交并比 (IoU) 为 0.832,准确率为 90.48%,召回率为 86.36%,精度为 98.96%,f1-Score 92.23%。根据地面真值线与检测线之间的平均横向距离 (ALD),将其中心线提取能力与基于霍夫变换和基于 SegNet 的方法进行了比较。所提出的方法在 640 * 360 分辨率图像中产生 1.943 像素的 ALD,优于基于霍夫变换的 (5.704) 和基于 SegNet 的 (3.555) 方法。准确率为 90.48%,召回率为 86.36%,准确率为 98.96%,f1-Score 为 92.23%。根据地面真值线与检测线之间的平均横向距离 (ALD),将其中心线提取能力与基于霍夫变换和基于 SegNet 的方法进行了比较。所提出的方法在 640 * 360 分辨率图像中产生 1.943 像素的 ALD,优于基于霍夫变换的 (5.704) 和基于 SegNet 的 (3.555) 方法。准确率为 90.48%,召回率为 86.36%,准确率为 98.96%,f1-Score 为 92.23%。根据地面真值线与检测线之间的平均横向距离 (ALD),将其中心线提取能力与基于霍夫变换和基于 SegNet 的方法进行了比较。所提出的方法在 640*360 分辨率图像中产生了 1.943 像素的 ALD,优于基于霍夫变换的 (5.704) 和基于 SegNet 的 (3.555) 方法。


























 京公网安备 11010802027423号
京公网安备 11010802027423号