Complex & Intelligent Systems ( IF 5.8 ) Pub Date : 2022-11-24 , DOI: 10.1007/s40747-022-00890-8 Sameh Abd-Elhaleem , Walaa Shoeib , Abdel Azim Sobaih
|
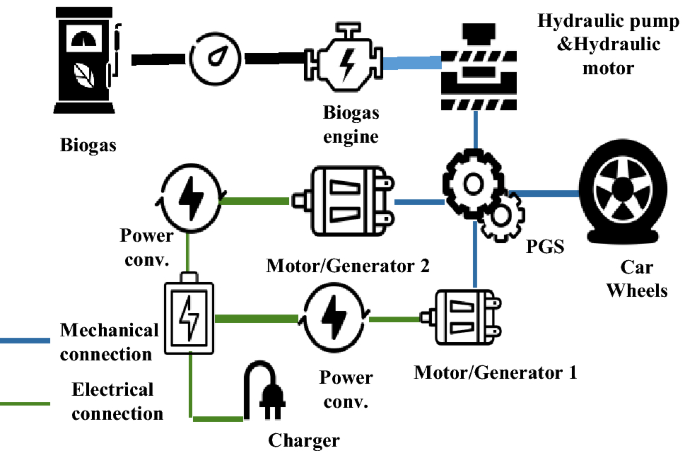
This paper presents a new intelligent power management strategy based on multi-objective cost function for plug-in biogas hybrid vehicles (PBHVs). This strategy consists of long-term power management and a short-term controller. The long-term power management depends on an improved generalized particle swarm optimization algorithm (IGPSO) to obtain the globally optimal values of motor and biogas engine torques. To reduce the computation time, five-mode rule-based control is used, where the IGPSO estimates the optimal values for the motor and engine torques in a hybrid mode depending on a multi-objective cost function. This cost function aims to reduce fuel consumption and the drawn current from the battery and takes into consideration the battery ageing. The short-term controller is designed using an interval type-2 Takagi–Sugeno-Kang (IT2TSK) fuzzy algorithm, which depends on human experts to overcome the uncertainties of the driving conditions. Lyapunov stability theory for the online controller is proved. The proposed technique improves the energy consumption compared to other techniques. The simulation results using real data for the engine, motor and battery illustrate the feasibility and effectiveness of the proposed approach with comparative results.
中文翻译:
基于多目标代价函数的插电式沼气混合动力汽车不确定行驶工况智能功率管理
本文提出了一种新的基于插电式沼气混合动力汽车 (PBHV) 多目标成本函数的智能电源管理策略。该策略由长期电源管理和短期控制器组成。长期功率管理依赖于改进的广义粒子群优化算法 (IGPSO) 以获得电机和沼气发动机扭矩的全局最优值。为了减少计算时间,使用基于五模式规则的控制,其中 IGPSO 根据多目标成本函数估计混合模式下电机和发动机扭矩的最佳值。该成本函数旨在减少燃料消耗和从电池汲取的电流,并考虑到电池老化。短期控制器采用区间 2 型 Takagi–Sugeno-Kang (IT2TSK) 模糊算法设计,依靠人类专家来克服驾驶条件的不确定性。证明了在线控制器的李亚普诺夫稳定性理论。与其他技术相比,所提出的技术改善了能量消耗。使用发动机、电机和电池的真实数据的仿真结果通过比较结果说明了所提出方法的可行性和有效性。

























 京公网安备 11010802027423号
京公网安备 11010802027423号