Journal of Process Control ( IF 4.2 ) Pub Date : 2022-09-12 , DOI: 10.1016/j.jprocont.2022.08.013 Hong-Gui Han, Chen-Yang Wang, Hao-Yuan Sun, Jun-Fei Qiao
|
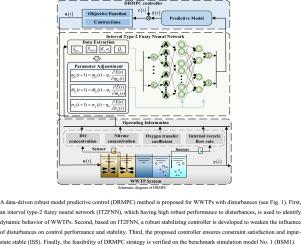
Data-driven methods are widely used in wastewater treatment processes (WWTPs). However, disturbances are not fully considered during the control process, which may affect the stable operation of WWTPs. To address this issue, a data-driven robust model predictive control (DRMPC) method is proposed for WWTPs with disturbances. First, an interval type-2 fuzzy neural network (IT2FNN), which has high robust performance to disturbances, is used to identify dynamic behavior of WWTPs. Second, based on IT2FNN, a robust stabilizing controller is developed to weaken the influence of disturbances on control performance and stability. Third, the proposed controller ensures constraint satisfaction and input-to-state stability (ISS). Finally, the feasibility of DRMPC strategy is verified on the benchmark simulation model No. 1 (BSM1). The experimental studies indicate that the proposed DRMPC is capable of running stably and tracking accurately.
中文翻译:
废水处理过程基于数据的鲁棒模型预测控制
数据驱动的方法广泛用于废水处理过程 (WWTP)。但在控制过程中没有充分考虑扰动,可能影响污水处理厂的稳定运行。为了解决这个问题,针对有扰动的污水处理厂提出了一种数据驱动的鲁棒模型预测控制(DRMPC)方法。首先,使用对扰动具有高鲁棒性的区间类型 2 模糊神经网络 (IT2FNN) 来识别污水处理厂的动态行为。其次,基于IT2FNN,开发了一种鲁棒稳定控制器,以削弱扰动对控制性能和稳定性的影响。第三,所提出的控制器确保了约束满足和输入到状态的稳定性(ISS)。最后,在基准仿真模型 1(BSM1)上验证了 DRMPC 策略的可行性。
























 京公网安备 11010802027423号
京公网安备 11010802027423号