Nature Communications ( IF 16.6 ) Pub Date : 2022-08-09 , DOI: 10.1038/s41467-022-32123-4 Guoyong Mao 1 , David Schiller 1, 2 , Doris Danninger 1, 2 , Bekele Hailegnaw 1, 2 , Florian Hartmann 1, 2 , Thomas Stockinger 1, 2 , Michael Drack 1, 2 , Nikita Arnold 1, 2 , Martin Kaltenbrunner 1, 2
|
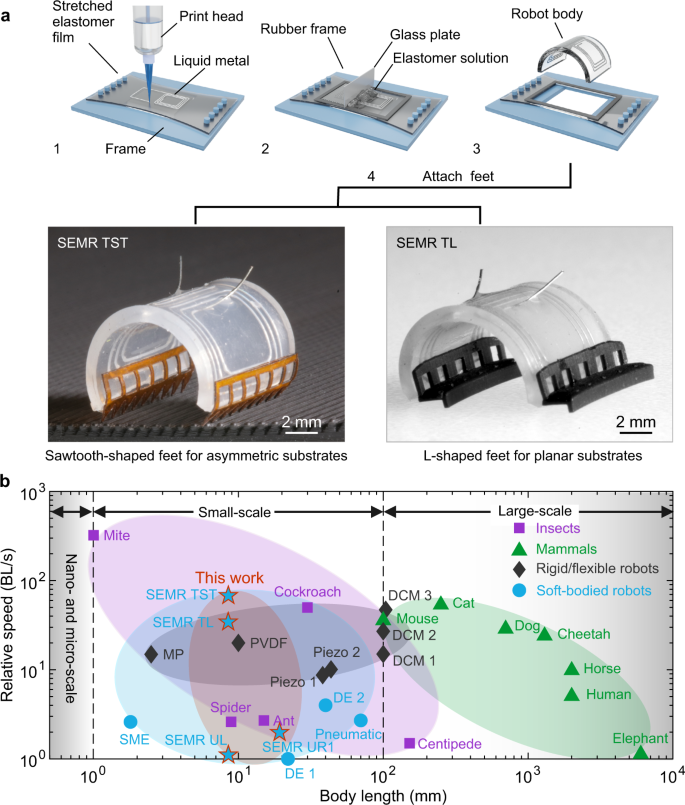
High-speed locomotion is an essential survival strategy for animals, allowing populating harsh and unpredictable environments. Bio-inspired soft robots equally benefit from versatile and ultrafast motion but require appropriate driving mechanisms and device designs. Here, we present a class of small-scale soft electromagnetic robots made of curved elastomeric bilayers, driven by Lorentz forces acting on embedded printed liquid metal channels carrying alternating currents with driving voltages of several volts in a static magnetic field. Their dynamic resonant performance is investigated experimentally and theoretically. These robust and versatile robots can walk, run, swim, jump, steer and transport cargo. Their tethered versions reach ultra-high running speeds of 70 BL/s (body lengths per second) on 3D-corrugated substrates and 35 BL/s on arbitrary planar substrates while their maximum swimming speed is 4.8 BL/s in water. Moreover, prototype untethered versions run and swim at a maximum speed of 2.1 BL/s and 1.8 BL/s, respectively.
中文翻译:
超高速小型软电磁机器人
高速运动是动物必不可少的生存策略,允许在恶劣和不可预测的环境中生存。仿生软机器人同样受益于多功能和超快运动,但需要适当的驱动机制和设备设计。在这里,我们展示了一类由弯曲的弹性双层制成的小型软电磁机器人,由洛伦兹力驱动,作用在嵌入的印刷液态金属通道上,在静磁场中承载具有几伏驱动电压的交流电。它们的动态谐振性能在实验和理论上进行了研究。这些坚固且用途广泛的机器人可以行走、奔跑、游泳、跳跃、驾驶和运输货物。它们的系留版本在 3D 波纹基材上达到 70 BL/s(每秒体长)的超高运行速度,在任意平面基材上达到 35 BL/s,而它们在水中的最大游泳速度为 4.8 BL/s。此外,原型无绳版本分别以 2.1 BL/s 和 1.8 BL/s 的最大速度运行和游泳。
























 京公网安备 11010802027423号
京公网安备 11010802027423号