Journal of Power Electronics ( IF 1.4 ) Pub Date : 2022-08-02 , DOI: 10.1007/s43236-022-00504-z Chunwei Cai , Qinyuan Cui , Xiangyao Meng , Shuai Wu , Wenping Chai
|
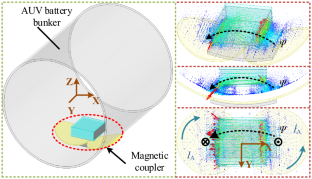
In this paper, a misalignment-tolerant wireless charging system based on multidimensional cross-coupling for autonomous underwater vehicles (AUVs) is proposed. The four transmitting coils of the proposed system magnetic coupler are divided evenly into two pairs as bipolar transmitting units. Subsequently, the uniform multi-dimensional horizontal magnetic flux can be obtained by two current vectors with a 90° phase difference exciting in the bipolar transmitting units. For the receiver, a couple of orthogonal coils are designed to form cross-coupling with the transmitter to pick up the maximum magnetic flux. Then, the proposed magnetic coupler combined with the proposed transmitter and receiver is designed through finite element analysis. Finally, a 900 W prototype is built and tested. Experimental results show that the system has stable output characteristics in the ranges of a − 20° to 20° rolling misalignment and a − 30 to 30 mm axial misalignment.
中文翻译:
基于多维交叉耦合的自主水下航行器容错无线充电系统设计
在本文中,提出了一种基于多维交叉耦合的自主水下航行器(AUV)的容错无线充电系统。所提出的系统磁耦合器的四个发射线圈被均匀地分成两对作为双极发射单元。随后,通过在双极发射单元中激励两个相位差为90°的电流矢量,可以获得均匀的多维水平磁通量。对于接收器,设计了一对正交线圈与发射器形成交叉耦合,以获取最大磁通量。然后,通过有限元分析设计了与所提出的发射器和接收器相结合的磁耦合器。最后,建造并测试了一个 900 W 的原型。

























 京公网安备 11010802027423号
京公网安备 11010802027423号