Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Droplet transportation by adjusting the temporal phase shift of surface acoustic waves in the exciter–exciter mode
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-07-21 , DOI: 10.1039/d2lc00402j Mingyang Sui 1 , Huijuan Dong 1 , Guanyu Mu 1 , Jingze Xia 1 , Jie Zhao 1 , Zhen Yang 2 , Tianlong Li 1 , Tong Sun 3 , Kenneth T V Grattan 1, 3
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-07-21 , DOI: 10.1039/d2lc00402j Mingyang Sui 1 , Huijuan Dong 1 , Guanyu Mu 1 , Jingze Xia 1 , Jie Zhao 1 , Zhen Yang 2 , Tianlong Li 1 , Tong Sun 3 , Kenneth T V Grattan 1, 3
Affiliation
|
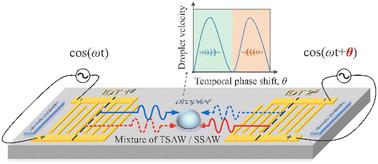
Droplet actuation using Surface Acoustic Wave (SAW) technology has been widely employed in ‘lab-on-a-chip’ applications, such as for on-chip Polymerase Chain Reactions. The current strategy uses the exciter-absorber mode (exciting a single InterDigital Transducer, IDT) to form a pure Travelling Surface Acoustic Wave (TSAW) and to actuate the droplet, where the velocity and direction of the droplet can be adjusted by controlling the on–off and amplitude of the excitation signals applied to a pair of IDTs. Herein, in a way that is different from using the exciter-absorber mode, we propose a method of actuating droplets by using the exciter–exciter mode (exciting a pair of IDTs simultaneously), where the velocity and directional adjustment of the droplet can be realized by changing only one excitation parameter for the signals (the temporal phase shift, θ), and the droplet velocity can also be significantly improved. Specifically, we report for the first time the equation of the vibration of the mixed waves (TSAW and Standing Surface Acoustic Wave (SSAW)) formed on the substrate surface using the exciter-exciter mode. This is analyzed theoretically, where it is shown in this work that the amplitude and direction of the TSAW component of the mixed waves can be adjusted by changing θ. Following that, the velocity and directional adjustment of the droplet has been realized by changing θ and the improvement of the droplet velocity has been verified on a one-dimensional SAW device, using this exciter–exciter mode. Moreover a series of experiments on droplet transportation, along different trajectories in an x–y plane, has been carried out using a two-dimensional SAW device and this has demonstrated the effectiveness of the θ changing-based approach. Here this exciter–exciter mode provides an alternative method for the transportation of droplets in ‘lab-on-a-chip’ applications.
中文翻译:

通过调整激发器-激发器模式下表面声波的时间相移来传输液滴
使用表面声波 (SAW) 技术的液滴驱动已广泛用于“芯片实验室”应用,例如芯片上聚合酶链式反应。目前的策略是使用激励器-吸收器模式(激励单个InterDigital Transducer,IDT)形成纯行表面声波(TSAW)并驱动液滴,其中可以通过控制on来调节液滴的速度和方向– 施加到一对 IDT 的激励信号的关断和幅度。在此,以不同于使用激励器 - 吸收器模式的方式,我们提出了一种通过使用激励器 - 激励器模式(同时激励一对 IDT)来驱动液滴的方法,θ ),并且液滴速度也可以显着提高。具体来说,我们首次报告了使用激励器-激励器模式在基板表面上形成的混合波(TSAW 和驻表面声波 (SSAW))的振动方程。对此进行了理论上的分析,在这项工作中表明,可以通过改变θ来调整混合波的 TSAW 分量的幅度和方向。之后,通过改变θ实现了液滴的速度和方向调整,并在一维 SAW 设备上验证了液滴速度的提高,使用了这种激励器 - 激励器模式。此外,一系列关于液滴运输的实验,沿着x中的不同轨迹– y平面,已使用二维 SAW 设备进行,这证明了基于θ变化的方法的有效性。在这里,这种激励器-激励器模式为“芯片实验室”应用中的液滴传输提供了一种替代方法。
更新日期:2022-07-21
中文翻译:
通过调整激发器-激发器模式下表面声波的时间相移来传输液滴
使用表面声波 (SAW) 技术的液滴驱动已广泛用于“芯片实验室”应用,例如芯片上聚合酶链式反应。目前的策略是使用激励器-吸收器模式(激励单个InterDigital Transducer,IDT)形成纯行表面声波(TSAW)并驱动液滴,其中可以通过控制on来调节液滴的速度和方向– 施加到一对 IDT 的激励信号的关断和幅度。在此,以不同于使用激励器 - 吸收器模式的方式,我们提出了一种通过使用激励器 - 激励器模式(同时激励一对 IDT)来驱动液滴的方法,θ ),并且液滴速度也可以显着提高。具体来说,我们首次报告了使用激励器-激励器模式在基板表面上形成的混合波(TSAW 和驻表面声波 (SSAW))的振动方程。对此进行了理论上的分析,在这项工作中表明,可以通过改变θ来调整混合波的 TSAW 分量的幅度和方向。之后,通过改变θ实现了液滴的速度和方向调整,并在一维 SAW 设备上验证了液滴速度的提高,使用了这种激励器 - 激励器模式。此外,一系列关于液滴运输的实验,沿着x中的不同轨迹– y平面,已使用二维 SAW 设备进行,这证明了基于θ变化的方法的有效性。在这里,这种激励器-激励器模式为“芯片实验室”应用中的液滴传输提供了一种替代方法。

























 京公网安备 11010802027423号
京公网安备 11010802027423号