Microsystem Technologies ( IF 2.1 ) Pub Date : 2022-07-08 , DOI: 10.1007/s00542-022-05340-6 Jianyang Cai, Junfeng Hu
|
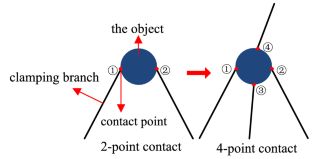
A novel spatial micro gripper for manipulating different size and irregular shape objects was presented. Two clamping links are mutually vertically placed in order to form four-point contact clamping mouth. The two-stage lever principle is applied to design the clamping links with the function of displacement amplification. The links structure comprises a lower groove and an upper groove. Two links can be actuated by only an actuator by nested assembling the upper and lower grooves in order to complete the spatial clamping operation. In order to improve the opening distance and clamping stability of the proposed micro-gripper, the model reflecting the relationship between the performances and structural parameters can be obtained based on support vector machine. The performance indexes can be optimized based on the model, and the opening distance increases by 15.64%, the clamping stability increases by 73%. The proposed spatial micro-gripper is used to manipulate the small bolt and resistance. The experimental results show that the micro gripper can clamp them stably, and it illustrates that the design idea and optimization method of micro gripper are effective.
中文翻译:
一种用于操纵不规则形状微型物体的新型空间微型夹具设计
提出了一种用于操纵不同尺寸和不规则形状物体的新型空间微型夹持器。两个夹持连杆相互垂直放置,形成四点接触夹持口。应用两级杠杆原理设计具有位移放大功能的夹紧连杆。连杆结构包括下槽和上槽。两个连杆通过上下凹槽嵌套组装,只需一个执行器即可驱动,以完成空间夹持操作。为了提高所提出的微型夹持器的张开距离和夹持稳定性,基于支持向量机可以得到反映性能与结构参数关系的模型。性能指标可以根据模型进行优化,开距增加15.64%,夹持稳定性增加73%。所提出的空间微型夹具用于操纵小螺栓和阻力。实验结果表明,微型夹具能够稳定地夹持它们,说明微型夹具的设计思想和优化方法是有效的。
























 京公网安备 11010802027423号
京公网安备 11010802027423号