Journal of Thermal Spray Technology ( IF 3.1 ) Pub Date : 2022-06-29 , DOI: 10.1007/s11666-022-01434-9 Fan Yang , Zhenhua Cai , Yuepeng Chen , Shujuan Dong , Chunming Deng , Shaopeng Niu , Wei Zeng , Shiping Wen
|
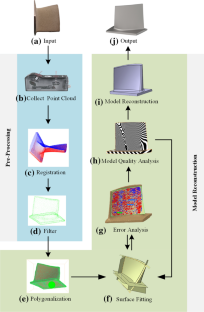
The roughness of thermal barrier coatings (TBCs) prepared on the surface of aero-engine turbine blades affects the lifetime of the coating and the life cycle and aerodynamic performance of the blades. To reduce the TBC surface roughness, this study proposes a robot polishing trajectory planning method that combines reverse engineering and finite element mesh technology. First, a 3D model of the blade was reconstructed in reverse engineering by using the fast surface modeling method. Then, a dense mesh with controlled spacing was obtained by mapping the finite element mesh arbitrary quadrilateral elements on the surface of the blade model. Finally, a robot polishing path of the blade was generated by sorting the index of mesh nodes. Using this approach, polishing experiments of aero-engine turbine blades were systematically carried out, and the coordinate system conversion method from the robot off-line programming simulation environment to the actual work station was used to map the robot trajectory. Meanwhile, the point cloud registration method was introduced to improve the system calibration accuracy. The experiments showed that the technical solution proposed in this paper could reduce the overall surface roughness of the thermal barrier coating from above Ra 8 μm to about Ra 0.5 μm, which contributes to the performance improvement for the TBCs of aero-engine blades.
中文翻译:
一种结合逆向工程和有限元网格技术的航空发动机涡轮叶片TBC机器人抛光轨迹规划方法
航空发动机涡轮叶片表面制备的热障涂层(TBCs)的粗糙度影响涂层的寿命以及叶片的生命周期和气动性能。为降低TBC表面粗糙度,本研究提出了一种结合逆向工程和有限元网格技术的机器人抛光轨迹规划方法。首先,使用快速表面建模方法在逆向工程中重建叶片的 3D 模型。然后,通过将有限元网格任意四边形单元映射到叶片模型表面,得到一个间距可控的密集网格。最后,通过对网格节点的索引进行排序,生成刀片的机器人抛光路径。利用这种方法,系统地进行了航空发动机涡轮叶片的抛光实验,并采用机器人离线编程仿真环境到实际工位的坐标系转换方法映射机器人轨迹。同时,引入点云配准方法,提高系统标定精度。实验表明,本文提出的技术方案可以将热障涂层的整体表面粗糙度从Ra 8 μm以上降低到Ra 0.5 μm左右,有助于提高航空发动机叶片TBCs的性能。

























 京公网安备 11010802027423号
京公网安备 11010802027423号