Nature Machine Intelligence ( IF 23.8 ) Pub Date : 2022-06-22 , DOI: 10.1038/s42256-022-00500-9 Keng Peng Tee, Samuel Cheong, Jun Li, Gowrishankar Ganesh
|
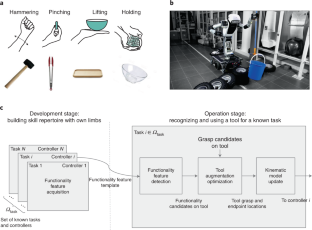
Human tool use prowess distinguishes us from other animals. In many scenarios, a human is able to recognize objects seen for the first time as potential tools for a task and use them without requiring any learning. Here we propose a framework to enable similar abilities in robots. We first characterized human tools to identify a special category of tools that humans are able to use immediately through a process of skill transfer from their limbs, rather than tool learning. Motivated by the tool characterization and our neuroscientific studies on human tool use and embodiment, we then developed a tool cognition framework that enables a robot to recognize a previously unseen object as a tool for a task and plan how to grasp and wield the tool in the face of constraints and obstacles, before finally performing the task with the tool. Furthermore, the framework allows for flexibility in tool use, where the same tool can be adapted for different tasks, and different tools for the same task, all without any prior learning or observation of tool use. We demonstrate the possibilities offered by our tool cognition framework in several robot experiments with both toy and real objects as tools.
中文翻译:
无需事先工具学习或观察的机器人工具认知框架
人类工具使用能力将我们与其他动物区分开来。在许多情况下,人类能够将第一次看到的物体识别为任务的潜在工具,并在不需要任何学习的情况下使用它们。在这里,我们提出了一个框架来实现机器人的类似能力。我们首先对人类工具进行了表征,以确定人类能够通过四肢技能转移过程立即使用的特殊工具类别,而不是工具学习。在工具表征和我们对人类工具使用和实施的神经科学研究的启发下,我们开发了一个工具认知框架,使机器人能够将以前看不见的物体识别为任务工具,并计划如何在面对约束和障碍,在最终使用工具执行任务之前。此外,该框架允许工具使用的灵活性,其中相同的工具可以适用于不同的任务,不同的工具适用于相同的任务,所有这些都无需事先学习或观察工具的使用。我们在玩具和真实物体作为工具的几个机器人实验中展示了我们的工具认知框架提供的可能性。
























 京公网安备 11010802027423号
京公网安备 11010802027423号