EURASIP Journal on Wireless Communications and Networking ( IF 2.6 ) Pub Date : 2022-06-23 , DOI: 10.1186/s13638-022-02139-x Yu Li , Haonan Feng , Zhankui Peng , Li Zhou , Jian Wan
|
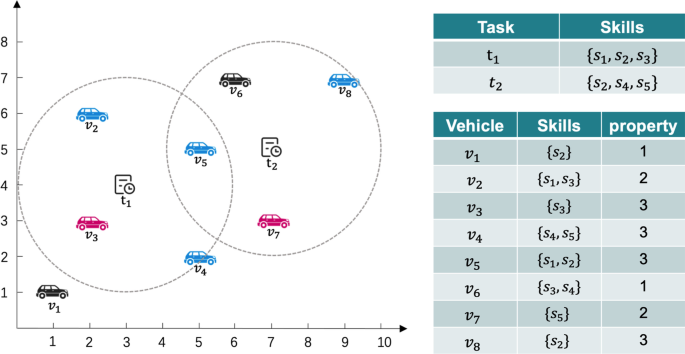
With the continuous development of mobile edge computing and the improvement of unmanned vehicle technology, unmanned vehicle could handle ever-increasing demands. As a significant application of unmanned vehicle, spatial crowdsourcing will provide an important application scenario, which is about to organize a lot of unmanned vehicle to conduct the spatial tasks by physically moving to its locations, called task assignment. Previous works usually focus on assigning a spatial task to one single vehicle or a group of vehicles. Few of them consider that vehicle team diversity is essential to collaborative work. Collaborative work is benefits from organizing teams with various backgrounds vehicles. In this paper, we consider a spatial crowdsourcing scenario. Each vehicle has a set of skills and a property. The property denotes vehicle’s special attribute (e.g., size, speed or weight). We introduce a concept of entropy to measure vehicle team diversity. Each spatial task (e.g., delivering the take-out, and carrying freight) is under the time and budget constraint, and required a set of skills. We need to assure that the assigned vehicle team is diverse. To address this issue, we first propose a practical problem, called team diversity spatial crowdsourcing (TD-SC) problem which finds an optimal team-and-task assignment strategy. Moreover, we design a framework which includes a greedy with diversity (GD) algorithm and a divide-and-conquer (D&C) algorithm to get team-and-task assignments. Finally, we demonstrate efficiency and effectiveness of the proposed methods through extensive experiments.
中文翻译:
移动众包中的多样性感知无人驾驶车队安排
随着移动边缘计算的不断发展和无人驾驶技术的进步,无人驾驶汽车可以应对日益增长的需求。空间众包作为无人驾驶车辆的重要应用,将提供一个重要的应用场景,即将组织大量无人驾驶车辆通过物理移动到其位置来执行空间任务,称为任务分配。以前的工作通常侧重于将空间任务分配给单个车辆或一组车辆。他们中很少有人认为车辆团队的多样性对于协作工作至关重要。协作工作是组织具有不同背景车辆的团队的好处。在本文中,我们考虑了一个空间众包场景。每辆车都有一套技能和属性。该属性表示车辆的特殊属性(例如,大小、速度或重量)。我们引入熵的概念来衡量车辆团队的多样性。每个空间任务(例如,运送外卖和运送货物)都受时间和预算约束,并且需要一套技能。我们需要确保分配的车辆团队是多样化的。为了解决这个问题,我们首先提出了一个实际问题,称为团队多样性空间众包(TD-SC)问题,该问题找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。我们引入熵的概念来衡量车辆团队的多样性。每个空间任务(例如,运送外卖和运送货物)都受时间和预算约束,并且需要一套技能。我们需要确保分配的车辆团队是多样化的。为了解决这个问题,我们首先提出了一个实际问题,称为团队多样性空间众包(TD-SC)问题,该问题找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。我们引入熵的概念来衡量车辆团队的多样性。每个空间任务(例如,运送外卖和运送货物)都受时间和预算约束,并且需要一套技能。我们需要确保分配的车辆团队是多样化的。为了解决这个问题,我们首先提出了一个实际问题,称为团队多样性空间众包(TD-SC)问题,该问题找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。和运送货物)是在时间和预算限制下,需要一套技能。我们需要确保分配的车辆团队是多样化的。为了解决这个问题,我们首先提出了一个实际问题,称为团队多样性空间众包(TD-SC)问题,该问题找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。和运送货物)是在时间和预算限制下,需要一套技能。我们需要确保分配的车辆团队是多样化的。为了解决这个问题,我们首先提出了一个实际问题,称为团队多样性空间众包(TD-SC)问题,该问题找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。称为团队多样性空间众包(TD-SC)问题,它找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。称为团队多样性空间众包(TD-SC)问题,它找到了一个最佳的团队和任务分配策略。此外,我们设计了一个框架,其中包括一个贪婪的多样性(GD)算法和一个分治法(D&C)算法来获得团队和任务分配。最后,我们通过广泛的实验证明了所提出方法的效率和有效性。

























 京公网安备 11010802027423号
京公网安备 11010802027423号