EURASIP Journal on Wireless Communications and Networking ( IF 2.6 ) Pub Date : 2022-05-03 , DOI: 10.1186/s13638-022-02120-8 Hanwen Zhang 1 , Hao Qin 1 , Yichao Zhang 2 , Zhen Qin 3 , Dajiang Chen 3 , Ji Gen 3
|
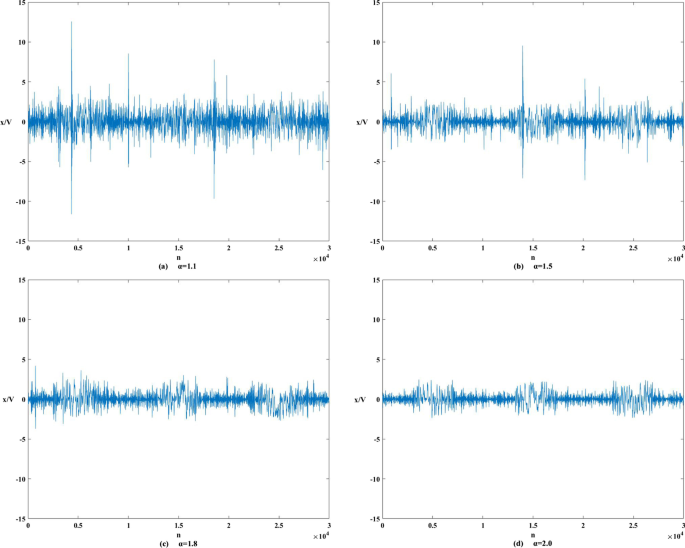
Nowadays, the increasingly complex and changeable marine environment makes the signals received by the underwater sensing equipment not only contain the weak signals radiated by underwater targets but also accompanied by marine solid background noise, which leads to the degradation and distortion of underwater acoustic signals and the decline of underwater communication quality. Under the severe influence of ocean noise, the underwater acoustic sensing and acquisition system will have the problems of high SNR ratio threshold, minimal sensing bandwidth, and unable to sense the signal with unknown frequency effectively. The Lévy noise model has been selected to describe the marine noise environment and explain its scientificity in this paper. A parameter estimation method for Lévy noise is proposed. Under the condition of characteristic index \(\alpha =1.5\) and noise intensity \(D=0.1\) of the Lévy noise model, the estimated mean values of parameters are 1.5026 and 1.1664. The estimated variances are 0.0034 and 0.0046, which proves the effectiveness and applicability of the estimation method. Then, an improved dual-coupled Duffing oscillator sensing system is proposed to sense the weak signals with unknown frequency under Lévy noise. Under the background of Lévy with characteristic index \(\alpha =1.5\), deflection parameter \(\beta =0\) and noise intensity \(D=0.1\), the sensing error rate of our system with unknown frequency is \(0.054\%\), the lowest sensing signal amplitude is \(A=0.010\), the lowest sensing SNR ratio is − 23.9254 dB, and the frequency of multi-frequency weak signals to be measured can be obtained. The estimation error of frequency sensing is \(0.33\%\).
中文翻译:
Lévy噪声背景下基于间歇混沌的实用水下信息传感系统
如今,海洋环境日益复杂多变,使得水下传感设备接收到的信号不仅包含水下目标辐射的微弱信号,还伴随着海洋固体背景噪声,导致水声信号的退化和失真,导致水声信号的退化和失真。水下通信质量下降。在海洋噪声的严重影响下,水声传感采集系统将存在信噪比阈值高、传感带宽小、无法有效感知未知频率信号等问题。本文选用 Lévy 噪声模型来描述海洋噪声环境并解释其科学性。提出了一种Lévy噪声的参数估计方法。特征指标条件下Lévy 噪声模型的\(\alpha =1.5\)和噪声强度\(D=0.1\),参数的估计平均值分别为 1.5026 和 1.1664。估计方差分别为0.0034和0.0046,证明了估计方法的有效性和适用性。然后,提出了一种改进的双耦合Duffing振荡器传感系统,用于在Lévy噪声下感知频率未知的微弱信号。在特征指数\(\alpha =1.5\)、偏转参数\(\beta =0\)和噪声强度\(D=0.1\)的Lévy背景下,我们的系统在未知频率下的感知错误率为\ (0.054\%\),最低感应信号幅度为\(A=0.010\),最低感测信噪比为−23.9254 dB,可以获得多频微弱信号的待测频率。频率感知的估计误差为\(0.33\%\)。

























 京公网安备 11010802027423号
京公网安备 11010802027423号