EURASIP Journal on Advances in Signal Processing ( IF 1.9 ) Pub Date : 2022-04-21 , DOI: 10.1186/s13634-022-00869-0 Huibao Yang 1 , Hongwu Huang 1, 2 , Xiujing Gao 2 , Banshuai Li 3 , Bo Xiao 3
|
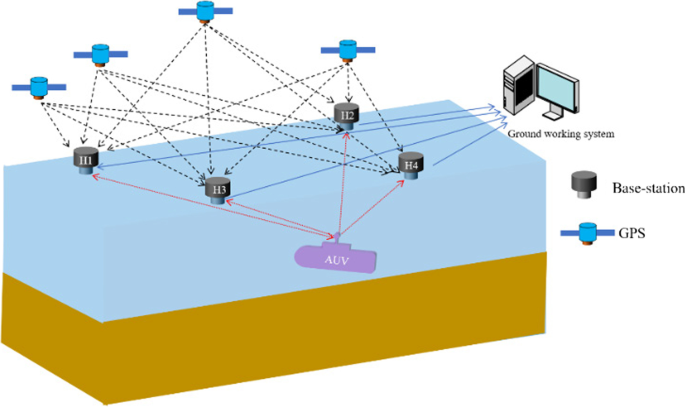
Autonomous underwater vehicles (AUVs) are essential assets for ocean exploration requiring reliable underwater positioning technology. Aiming to improve the latter technology in a low SNR and reverberation environment, the Chan–Taylor hybrid positioning algorithm establishes a long-baseline system (LBL) based on the time difference of arrival (TDOA) by reducing the number of sensors required while preserving the positioning accuracy. However, the traditional LBL algorithm’s accuracy is reduced due to the critical time delay estimation under such environmental conditions. Hence, this paper suggests a new LBL positioning technology relying on an empirical mode decomposition (EMD) to construct a filter function combined with the maximum likelihood (ML) estimation method. MATLAB/Simulink is applied to establish the simulation environment of LBL localization system, simulating the AUV motion under 5–30 dB SNR. This paper analyzes the accuracy of TDOA by generalizing the cross-correlation method (GCC), phase transform (PHAT), ML, and EMD–ML. Based on the TDOA value obtained by the EMD–ML filtering algorithm, the positioning errors of the Chan–Taylor hybrid positioning algorithm and the Chan algorithm are compared. The results show that comparative synthetic evaluations against the traditional GCC demonstrate that the proposed method has a higher time delay estimation accuracy within a reverberation environment with SNR less than 15 dB. The Chan–Taylor hybrid positioning algorithm limits the errors of the CHAN algorithm and improves the overall positioning system accuracy.
中文翻译:
基于EMD-ML混合方法的LBL定位算法
自主水下航行器 (AUV) 是海洋探索的重要资产,需要可靠的水下定位技术。为了在低信噪比和混响环境下改进后一种技术,Chan-Taylor 混合定位算法通过减少所需的传感器数量,同时保留定位精度。然而,由于在这种环境条件下的临界时延估计,传统的LBL算法的准确性降低。因此,本文提出了一种基于经验模态分解(EMD)的LBL定位技术,结合最大似然(ML)估计方法构建滤波函数。应用MATLAB/Simulink建立LBL定位系统的仿真环境,模拟5-30 dB SNR下的AUV运动。本文通过推广互相关法 (GCC)、相位变换 (PHAT)、ML 和 EMD-ML 来分析 TDOA 的准确性。基于EMD-ML滤波算法得到的TDOA值,比较了Chan-Taylor混合定位算法和Chan算法的定位误差。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。模拟 5–30 dB SNR 下的 AUV 运动。本文通过推广互相关法 (GCC)、相位变换 (PHAT)、ML 和 EMD-ML 来分析 TDOA 的准确性。基于EMD-ML滤波算法得到的TDOA值,比较了Chan-Taylor混合定位算法和Chan算法的定位误差。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。模拟 5–30 dB SNR 下的 AUV 运动。本文通过推广互相关法 (GCC)、相位变换 (PHAT)、ML 和 EMD-ML 来分析 TDOA 的准确性。基于EMD-ML滤波算法得到的TDOA值,比较了Chan-Taylor混合定位算法和Chan算法的定位误差。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。和 EMD-ML。基于EMD-ML滤波算法得到的TDOA值,比较了Chan-Taylor混合定位算法和Chan算法的定位误差。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。和 EMD-ML。基于EMD-ML滤波算法得到的TDOA值,比较了Chan-Taylor混合定位算法和Chan算法的定位误差。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。结果表明,与传统 GCC 的比较综合评估表明,该方法在 SNR 小于 15 dB 的混响环境中具有更高的时延估计精度。Chan-Taylor混合定位算法限制了CHAN算法的误差,提高了整体定位系统的精度。


























 京公网安备 11010802027423号
京公网安备 11010802027423号