International Journal of Mechanical Sciences ( IF 7.3 ) Pub Date : 2021-12-04 , DOI: 10.1016/j.ijmecsci.2021.106981 Irina G. Goryacheva 1, 2 , Alexandra A. Zobova 2
|
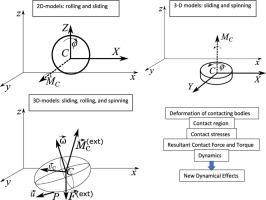
This review presents a collection of the solved dynamic problems taking into account the normal and shear stress distributions in the contact region due to the deformation of contacting bodies. The considered dynamic problems differ in the number of degrees of freedom and the type of relative displacements of contacting bodies (2-D models with rolling and sliding, 3-D models with sliding and spinning, 3-D models with sliding, rolling and spinning). The contact mechanics solutions are used in formulation of the dynamic problems, which are studied based on the analytical or semi-analytical approach. The effects of the mechanical properties of the contacting bodies and the contact conditions on the dynamics are analyzed and discussed.
中文翻译:
具有滑动、滚动和旋转的可变形接触体的动力学
这篇综述介绍了一系列已解决的动态问题,其中考虑了由于接触体变形而导致的接触区域中的法向和剪应力分布。所考虑的动态问题在自由度数和接触体的相对位移类型方面有所不同(2-D 模型滚动和滑动,3-D 模型滑动和旋转,3-D 模型滑动,滚动和旋转)。接触力学解决方案用于制定动态问题,这些问题基于解析或半解析方法进行研究。分析和讨论了接触体的力学性能和接触条件对动力学的影响。


























 京公网安备 11010802027423号
京公网安备 11010802027423号