Medical Image Analysis ( IF 10.9 ) Pub Date : 2021-11-06 , DOI: 10.1016/j.media.2021.102302 P J Eddie Edwards 1 , Dimitris Psychogyios 1 , Stefanie Speidel 2 , Lena Maier-Hein 3 , Danail Stoyanov 1
|
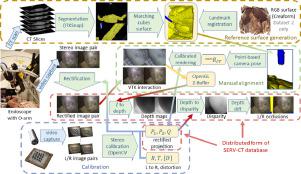
In computer vision, reference datasets from simulation and real outdoor scenes have been highly successful in promoting algorithmic development in stereo reconstruction. Endoscopic stereo reconstruction for surgical scenes gives rise to specific problems, including the lack of clear corner features, highly specular surface properties and the presence of blood and smoke. These issues present difficulties for both stereo reconstruction itself and also for standardised dataset production. Previous datasets have been produced using computed tomography (CT) or structured light reconstruction on phantom or ex vivo models. We present a stereo-endoscopic reconstruction validation dataset based on cone-beam CT (SERV-CT). Two ex vivo small porcine full torso cadavers were placed within the view of the endoscope with both the endoscope and target anatomy visible in the CT scan. Subsequent orientation of the endoscope was manually aligned to match the stereoscopic view and benchmark disparities, depths and occlusions are calculated. The requirement of a CT scan limited the number of stereo pairs to 8 from each ex vivo sample. For the second sample an RGB surface was acquired to aid alignment of smooth, featureless surfaces. Repeated manual alignments showed an RMS disparity accuracy of around 2 pixels and a depth accuracy of about 2 mm. A simplified reference dataset is provided consisting of endoscope image pairs with corresponding calibration, disparities, depths and occlusions covering the majority of the endoscopic image and a range of tissue types, including smooth specular surfaces, as well as significant variation of depth. We assessed the performance of various stereo algorithms from online available repositories. There is a significant variation between algorithms, highlighting some of the challenges of surgical endoscopic images. The SERV-CT dataset provides an easy to use stereoscopic validation for surgical applications with smooth reference disparities and depths covering the majority of the endoscopic image. This complements existing resources well and we hope will aid the development of surgical endoscopic anatomical reconstruction algorithms.
中文翻译:
SERV-CT:来自锥形束 CT 的视差数据集,用于验证内窥镜 3D 重建
在计算机视觉中,来自模拟和真实户外场景的参考数据集在促进立体重建算法的发展方面取得了巨大成功。手术场景的内窥镜立体重建会产生特定的问题,包括缺乏清晰的角落特征、高度镜面反射的表面特性以及血液和烟雾的存在。这些问题给立体重建本身和标准化数据集生产带来了困难。以前的数据集是使用计算机断层扫描 (CT) 或结构光重建模型或体外模型生成的。我们提出了一个基于锥形束 CT (SERV-CT) 的立体内窥镜重建验证数据集。两个离体将小型猪全躯干尸体放置在内窥镜视野内,在 CT 扫描中可以看到内窥镜和目标解剖结构。手动对齐内窥镜的后续方向以匹配立体视图,并计算基准差异、深度和遮挡。CT 扫描的要求将每个离体的立体对数限制为 8 个样本。对于第二个样本,获取 RGB 表面以帮助对齐平滑、无特征的表面。重复的手动对齐显示了大约 2 个像素的 RMS 视差精度和大约 2 mm 的深度精度。提供了一个简化的参考数据集,由内窥镜图像对组成,具有相应的校准、差异、深度和遮挡,覆盖了大部分内窥镜图像和一系列组织类型,包括光滑的镜面,以及深度的显着变化。我们从在线可用的存储库中评估了各种立体算法的性能。算法之间存在显着差异,突出了外科内窥镜图像的一些挑战。SERV-CT 数据集为手术应用提供了一种易于使用的立体验证,其平滑的参考差异和深度覆盖了大部分内窥镜图像。这很好地补充了现有资源,我们希望将有助于外科内窥镜解剖重建算法的发展。


























 京公网安备 11010802027423号
京公网安备 11010802027423号