International Journal of Mechanical Sciences ( IF 7.3 ) Pub Date : 2021-09-23 , DOI: 10.1016/j.ijmecsci.2021.106831 Legeng Lin 1 , Fuhai Zhang 1 , Lei Yang 1 , Yili Fu 1
|
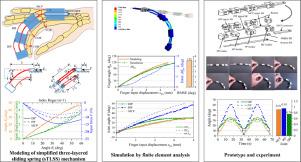
Poststroke patients’ need for hand rehabilitation is urgent since hand plays a significant role in people's activities of daily life (ADLs). Contrast to traditional rigid devices with excessive stiffness and soft devices lacking well-understood models, we present a hybrid soft-rigid exoskeleton (HSRexo) for poststroke hand rehabilitation adopting the simplified three-layered sliding spring (sTLSS) mechanism that combines the intrinsic compliance and comprehensible kinematics. The compliant spring blades in the sTLSS mechanism make it possible to compactly actuate three natural flexion/extension of finger joints by only 1 ° of freedom (DOF). To deal with the nonlinear deformation of soft elastic elements, the modeling of the sTLSS mechanism is proposed by the pseudo-rigid-body model (PRBM) method to achieve comprehensible kinematics and optimize design parameters. Finally, the simulation and preliminary prototyping demonstrate the accuracy of the model and the compliant natural flexion/extension joint angle of the HSRexo design due to the modeling and optimization of the sTLSS mechanism.
中文翻译:
用于中风后康复的混合软硬手外骨骼的设计与建模
由于手在人们的日常生活活动 (ADLs) 中起着重要作用,因此中风后患者对手部康复的需求非常迫切。与刚度过大的传统刚性设备和缺乏易于理解的模型的软设备相比,我们提出了一种混合软刚性外骨骼 (HSRexo),用于中风后手部康复,采用简化的三层滑动弹簧 (sTLSS) 机制,结合了内在顺应性和可理解的运动学。sTLSS 机构中的柔顺弹簧叶片可以通过仅 1° 的自由度 (DOF) 紧凑地驱动手指关节的三个自然屈曲/伸展。处理软弹性单元的非线性变形,通过伪刚体模型(PRBM)方法提出了sTLSS机制的建模,以实现可理解的运动学并优化设计参数。最后,由于 sTLSS 机制的建模和优化,仿真和初步原型设计证明了模型的准确性和 HSRexo 设计的顺应自然屈曲/伸展关节角度。

























 京公网安备 11010802027423号
京公网安备 11010802027423号