Nano Energy ( IF 17.6 ) Pub Date : 2021-09-16 , DOI: 10.1016/j.nanoen.2021.106499 Yang Wang 1 , Ming Dai 2 , Heting Wu 1, 3 , Lin Xu 1, 4 , Tongtong Zhang 1, 3 , Wenshuai Chen 2 , Zhong Lin Wang 1, 5 , Ya Yang 1, 3, 4
|
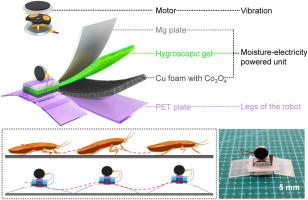
Sustainable operation of microrobots mandatorily needs a continuous supply of energy, which is usually provided by a battery. However, with the miniaturization of the microrobot, the reduction of weight, and the limited lifetime of battery, self-powering of microrobot is a key challenge. Inspired by the crawling of cockroaches, we present an untethered insect-scale robot driven by moisture induced electric power. A moisture-based energy harvesting device has been exploited and embedded in the microrobot, which can capture and store atmospheric water under various environmental conditions through a hygroscopic gel and generate electricity based on redox reaction. The device produces an output voltage of ~1.4 V and an output current of ~43 mA. A combination of moisture-electricity powered vertical vibration and the asymmetric structural design of the microrobot enables its forward locomotion at an average speed of ~4.01 cm/s. Our work could facilitate multifunctionality in future self-powered microrobots and mesoscale devices.
中文翻译:
自供电微型机器人的水分感应电
微型机器人的可持续运行需要持续的能量供应,通常由电池提供。然而,随着微型机器人的小型化、重量的减轻和电池寿命的限制,微型机器人的自供电成为一个关键挑战。受蟑螂爬行的启发,我们提出了一种由湿气感应电力驱动的不受束缚的昆虫级机器人。一种基于水分的能量收集装置已被开发并嵌入微型机器人中,它可以通过吸湿凝胶在各种环境条件下捕获和储存大气水分,并基于氧化还原反应发电。该器件产生 ~1.4 V 的输出电压和 ~43 mA 的输出电流。湿电驱动的垂直振动和微型机器人的不对称结构设计相结合,使其能够以~4.01 cm/s 的平均速度向前运动。我们的工作可以促进未来自供电微型机器人和中尺度设备的多功能性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号