Journal of the Mechanical Behavior of Biomedical Materials ( IF 3.9 ) Pub Date : 2021-09-09 , DOI: 10.1016/j.jmbbm.2021.104818 Yuhang Zhang 1 , Dongfang Xu 1 , Jiejie Li 1 , Zhennan Zhang 1 , Suhang Ding 1 , Wenwang Wu 2 , Re Xia 3
|
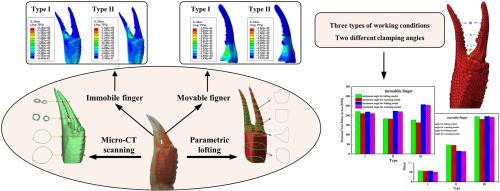
The high-performing biomimetic behaviors of crustaceans are the optimal results of long-time wise adaption to their living environment. One outstanding prototype is crab claw, which has the combining advantages of lightweight and high strength. To promote relevant engineering applications, it is imperative to explore its mechanical behaviors and structural characteristics. In this work, mechanical test and finite element analysis (FEA) are performed to reveal the fundamental mechanical properties and clamping behaviors of snow crab (Chionoecetes opilio) claw, respectively. A lightweight modeling method, parametric lofting modeling, for the 3D modeling of the claw is employed, which is compared with the traditional reverse engineering modeling method based on tomography image. Our results demonstrated that the hardness and modulus of the regions near the top of the claw are larger than those of the regions near of bottom of the claw. Moisture is a critical factor in controlling the tensile behavior of the claw and the wet specimens exhibit higher modulus and strength under tensile loading. Besides, The parametric lofting method is highly flexible and efficient in generating 3D geometrical model. The investigation of clamping behaviors provides not only insights into mechanical behaviors and intrinsic mechanisms but also a practical guide for their potential applications, such as designing high-performing artificial clamping muscles for clinical operations, aerospace applications, and robotics.
中文翻译:
雪蟹爪的力学性能及夹持行为
甲壳类动物的高性能仿生行为是对其生存环境长期明智适应的最佳结果。一个杰出的原型是蟹爪,它兼具轻量化和高强度的优势。为了促进相关工程应用,探索其力学行为和结构特征势在必行。在这项工作中,进行了力学测试和有限元分析 (FEA),分别揭示了雪蟹 (Chionoecetes opilio) 爪的基本力学性能和夹持行为。与传统的基于断层扫描图像的逆向工程建模方法相比,采用轻量化建模方法,参数化放样建模,用于爪的3D建模。我们的结果表明,爪顶部附近区域的硬度和模量大于爪底部附近区域的硬度和模量。水分是控制爪的拉伸行为的关键因素,湿试样在拉伸载荷下表现出更高的模量和强度。此外,参数化放样方法在生成3D几何模型方面具有高度的灵活性和效率。夹持行为的研究不仅提供了对机械行为和内在机制的见解,而且还为其潜在应用提供了实用指南,例如为临床操作、航空航天应用和机器人设计高性能人工夹持肌肉。水分是控制爪的拉伸行为的关键因素,湿试样在拉伸载荷下表现出更高的模量和强度。此外,参数化放样方法在生成3D几何模型方面具有高度的灵活性和效率。夹持行为的研究不仅提供了对机械行为和内在机制的见解,而且还为其潜在应用提供了实用指南,例如为临床操作、航空航天应用和机器人设计高性能人工夹持肌肉。水分是控制爪的拉伸行为的关键因素,湿试样在拉伸载荷下表现出更高的模量和强度。此外,参数化放样方法在生成3D几何模型方面具有高度的灵活性和效率。夹持行为的研究不仅提供了对机械行为和内在机制的见解,而且还为其潜在应用提供了实用指南,例如为临床操作、航空航天应用和机器人设计高性能人工夹持肌肉。

























 京公网安备 11010802027423号
京公网安备 11010802027423号