Computers & Graphics ( IF 2.5 ) Pub Date : 2021-09-02 , DOI: 10.1016/j.cag.2021.08.020 Vahid Rahmani 1 , Nuria Pelechano 2
|
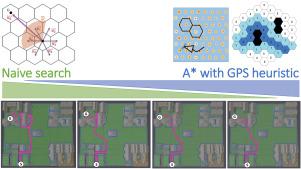
Path finding for autonomous agents has been traditionally driven by finding optimal paths, typically by using A* search or any of its variants. When it comes to simulating virtual humanoids, traditional approaches rarely consider aspects of human memory or orientation. In this work, we propose a new path finding algorithm, inspired by current research regarding how the brain learns and builds cognitive maps. Our method represents the space as a hexagonal grid with counters, based on brain research that has investigated how memory cells are fired. Our path finder then combines a method for exploring unknown environments while building such a cognitive map, with an A* search using a modified heuristic that takes into account the cognitive map. The resulting paths show how as the agent learns the environment, the paths become shorter and more consistent with the optimal A* search. Moreover, we run a perceptual study to demonstrate that the viewers could successfully identify the intended level of knowledge of the simulated agents. This line of research could enhance the believability of autonomous agents’ path finding in video games and other VR applications.
中文翻译:
走向类似人类的寻路方法
自主代理的路径寻找传统上是通过寻找最佳路径来驱动的,通常是通过使用 A* 搜索或其任何变体。在模拟虚拟人形机器人时,传统方法很少考虑人类记忆或方向的方面。在这项工作中,我们提出了一种新的寻路算法,其灵感来自当前关于大脑如何学习和构建认知地图的研究。我们的方法将空间表示为带有计数器的六边形网格,基于对记忆细胞如何被激发的大脑研究进行了调查。然后,我们的路径查找器将一种在构建此类认知地图的同时探索未知环境的方法与使用考虑认知地图的改进启发式算法进行 A* 搜索相结合。结果路径显示了代理如何学习环境,路径变得更短,并且与最优 A* 搜索更加一致。此外,我们进行了一项感知研究,以证明观众可以成功识别模拟代理的预期知识水平。这一系列研究可以提高自主代理在视频游戏和其他 VR 应用中寻路的可信度。


























 京公网安备 11010802027423号
京公网安备 11010802027423号