Transportation Research Part F: Traffic Psychology and Behaviour ( IF 4.349 ) Pub Date : 2021-07-21 , DOI: 10.1016/j.trf.2021.07.007 Vishal C. Kummetha 1 , Alexandra Kondyli 2 , Hannes Devos 3
|
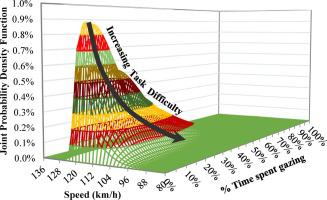
Driver comprehension is a substantial component of situation awareness that involves the ability of an individual to understand the significance of an object, traffic sign, or hazard while driving. An increase in crashes related to autonomous driving systems has raised a concern regarding the safety of other roadway users due to the diminishing accountability resulting from a general lack of understanding of the limitations or disregard of the safety protocols by users. To keep drivers vigilant when engaged in partial automated systems, a methodology to monitor real-time driver comprehension was proposed. A driving simulator study consisting of 90 participants, equally split between males and females, was executed to establish driver comprehension in six different variations of driving difficulty. Joint probability density functions were created by considering percent time spent gazing, answers to probe questions, and driving performance. Based on these density functions, five levels of comprehension were devised and assigned thresholds. Overall, as task difficulty increased, a non-linear deterioration in driving speed along with an increase in total gaze duration was observed before comprehension was attained. A two-step validation protocol was also proposed to ensure similar levels of comprehension to non-automated driving from the human driver, when engaged in early forms of automation. The proposed real-time driver comprehension monitoring constitutes a first step toward developing a methodology to reinstate the accountability of safety of other roadway users when engaged in driver-in-the-loop automation systems.
中文翻译:
评估驾驶员对道路环境的理解,以保持驾驶自动化过程中的安全责任
驾驶员理解力是情境意识的重要组成部分,涉及个人在驾驶时理解物体、交通标志或危险的重要性的能力。与自动驾驶系统相关的碰撞增加引起了对其他道路用户安全的担忧,这是由于用户普遍缺乏对限制的理解或无视安全协议而导致的责任减少。为了让驾驶员在使用部分自动化系统时保持警惕,提出了一种监控实时驾驶员理解的方法。一项由 90 名参与者组成的驾驶模拟器研究被执行,以建立驾驶员对六种不同驾驶难度变化的理解。联合概率密度函数是通过考虑花费在凝视上的时间百分比、探索问题的答案和驾驶性能来创建的。基于这些密度函数,设计了五个级别的理解并指定了阈值。总体而言,随着任务难度的增加,在获得理解之前观察到驾驶速度的非线性恶化以及总凝视持续时间的增加。还提出了一个两步验证协议,以确保在参与早期自动化形式时,人类驾驶员对非自动驾驶的理解水平相似。提议的实时驾驶员理解监控是开发一种方法的第一步,该方法可以在参与驾驶员在环自动化系统时恢复其他道路用户的安全责任。


























 京公网安备 11010802027423号
京公网安备 11010802027423号