当前位置:
X-MOL 学术
›
Adv. Funct. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Bioinspired Triboelectric Soft Robot Driven by Mechanical Energy
Advanced Functional Materials ( IF 19.0 ) Pub Date : 2021-07-08 , DOI: 10.1002/adfm.202104770 Yuan Liu 1, 2 , Baodong Chen 1, 2, 3 , Wei Li 4 , Lulu Zu 1, 2 , Wei Tang 1, 2, 3 , Zhong Lin Wang 1, 2, 5
Advanced Functional Materials ( IF 19.0 ) Pub Date : 2021-07-08 , DOI: 10.1002/adfm.202104770 Yuan Liu 1, 2 , Baodong Chen 1, 2, 3 , Wei Li 4 , Lulu Zu 1, 2 , Wei Tang 1, 2, 3 , Zhong Lin Wang 1, 2, 5
Affiliation
|
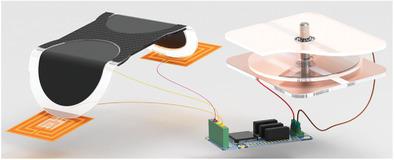
A sustainable power source is a key technical challenge for practical applications of electrically responsive soft robots, especially the required voltage is over several thousand volts. Here, a practicable new technology, triboelectric soft robot (TESR) system with the primary characteristics of power source from mechanical energy, is developed. At its heart is TESR with bioinspired architectures made of soft-deformable body and two triboelectric adhesion feet, which is driven and accurately controlled through triboelectric effect, while reaching maximum crawling speeds of 14.9 mm s−1 on the acrylic surface. The characteristics of the TESR, including displacement and force, are tested and simulated under the power of a rotary freestanding triboelectric nanogenerator (RF-TENG). Crawling of TESR is successfully realized on different materials surfaces and different angle slopes under the driven of RF-TENG. Furthermore, a real-time visual monitoring platform, in which TESR carries a micro camera to transmit images in a long narrow tunnel, is also achieved successfully, indicating that it can be used for fast diagnosis in an area inaccessible to human beings in the future. This study offers a new insight into the sustainable power source technologies suitable for electrically responsive soft robots and contributes to expanding the applicability of TENGs.
中文翻译:

机械能驱动的仿生摩擦电软机器人
可持续的电源是电响应软机器人实际应用的关键技术挑战,尤其是所需的电压超过几千伏。在这里,开发了一种实用的新技术,摩擦电软机器人(TESR)系统,其主要特点是机械能动力源。TESR 的核心是具有仿生结构的 TESR,它由可变形的软体和两个摩擦电粘附脚制成,通过摩擦电效应驱动和精确控制,同时达到 14.9 毫米 s 的最大爬行速度 - 1在亚克力表面。在旋转独立式摩擦纳米发电机 (RF-TENG) 的功率下测试和模拟 TESR 的特性,包括位移和力。在RF-TENG的驱动下,TESR在不同材料表面和不同角度斜率上的爬行成功实现。此外,TESR搭载微型摄像头在狭长隧道内传输图像的实时视觉监测平台也成功实现,表明未来可用于人类无法进入的区域的快速诊断. 这项研究为适用于电响应软机器人的可持续电源技术提供了新的见解,并有助于扩大 TENG 的适用性。
更新日期:2021-09-16
中文翻译:
机械能驱动的仿生摩擦电软机器人
可持续的电源是电响应软机器人实际应用的关键技术挑战,尤其是所需的电压超过几千伏。在这里,开发了一种实用的新技术,摩擦电软机器人(TESR)系统,其主要特点是机械能动力源。TESR 的核心是具有仿生结构的 TESR,它由可变形的软体和两个摩擦电粘附脚制成,通过摩擦电效应驱动和精确控制,同时达到 14.9 毫米 s 的最大爬行速度 - 1在亚克力表面。在旋转独立式摩擦纳米发电机 (RF-TENG) 的功率下测试和模拟 TESR 的特性,包括位移和力。在RF-TENG的驱动下,TESR在不同材料表面和不同角度斜率上的爬行成功实现。此外,TESR搭载微型摄像头在狭长隧道内传输图像的实时视觉监测平台也成功实现,表明未来可用于人类无法进入的区域的快速诊断. 这项研究为适用于电响应软机器人的可持续电源技术提供了新的见解,并有助于扩大 TENG 的适用性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号