Applied Ocean Research ( IF 4.3 ) Pub Date : 2021-06-25 , DOI: 10.1016/j.apor.2021.102753 Seyed Miad Salehi , Mohsen Ebrahimi
|
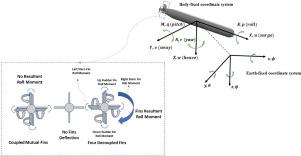
Autonomous Underwater Vehicles (AUVs) are subjected to several induced roll-destabilizing internal/external moments. Thus, roll control is a significant issue for many researchers, designers, and engineers to define, design, or perform the desired AUV missions due to the coupled dynamics of roll and other degrees of freedom (DOFs). In this paper, the roll dynamics and control enhancement of a REMUS AUV is studied using a four-decoupled-fins (FDF) roll control system by developing a 6DOF simulator. The results show that: 1) the roll angle deflections considerably affect the other degrees of freedom due to their coupled dynamics in both open-loop and closed-loop systems; 2) In large roll angle deflections, the FDF system (70% stern and 30% rudder fins) is needed to produce sufficient minimum oscillatory roll control forces. 3) The fins incident flow has lower energies in producing the roll control forces in lower forward speeds, causing the fluctuations of actuators' inputs and trajectory paths. 4) A limited but considerable desired roll angle can be achieved at a given forward speed; the maximum value of desired roll angle is for the desired forward speed of .
中文翻译:
四解耦鳍系统对海洋AUV的滚动动力学和控制增强
自主水下航行器 (AUV) 会受到若干诱发的内/外翻滚不稳定力矩。因此,由于侧倾和其他自由度 (DOF) 的耦合动力学,侧倾控制是许多研究人员、设计师和工程师定义、设计或执行所需 AUV 任务的重要问题。在本文中,通过开发 6DOF 模拟器,使用四解耦鳍 (FDF) 侧倾控制系统研究了 REMUS AUV 的侧倾动力学和控制增强。结果表明: 1)由于在开环和闭环系统中的耦合动力学,侧倾角偏转显着影响其他自由度;2) 在大横滚角偏转中,需要 FDF 系统(70% 的尾翼和 30% 的舵翼)来产生足够的最小振荡横摇控制力。3) 鳍片入射流在较低的前进速度下产生侧倾控制力的能量较低,导致执行器输入和轨迹路径的波动。4)在给定的前进速度下可以实现有限但相当大的所需侧倾角;所需滚转角的最大值为 对于所需的前进速度 .


























 京公网安备 11010802027423号
京公网安备 11010802027423号