Cell Reports Physical Science ( IF 8.9 ) Pub Date : 2021-06-03 , DOI: 10.1016/j.xcrp.2021.100439 Yifan Si , Jinlian Hu , Zhichao Dong
|
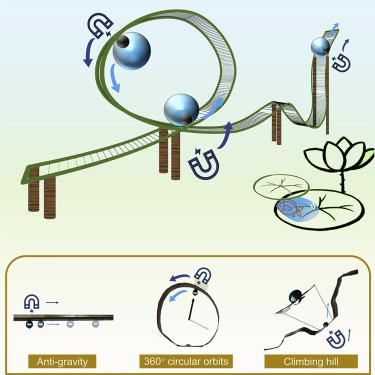
There is growing interest in controlled liquid manipulation that is crucial for microfluidic transport, medical diagnostics, and chemical analysis. Existing liquid manipulation methods are restrained in 3 aspects: velocity, space, and environment. Inspired by nature, here, we report a magnetically driven liquid precise manipulation strategy based on the adhesive force between the internal superhydrophilic iron bead and the liquid, which can drive or stop droplets within velocity and volume range of 4 orders of magnitude in an arbitrary path. The droplet velocity can reach ∼2 m/s (2,000 body lengths/s). This strategy breaks space limitation and allows droplets to move along a 360° circle in 3 dimensions and to climb/downhill with any gradient. Magnetically driven liquid manipulation on general solid surfaces or in liquid environments are reported. We propose the concept of the hydrobot and reveal its practical application potential in the fields of soft microrobotics, including cleaning and cargo transportation.
中文翻译:
仿生磁驱动液体操纵作为微型机器人
人们对受控液体操作越来越感兴趣,这对于微流体传输、医学诊断和化学分析至关重要。现有的液体操纵方法在三个方面受到限制:速度、空间和环境。受大自然的启发,在此,我们报告了一种基于内部超亲水铁珠与液体之间的粘附力的磁驱动液体精确操纵策略,该策略可以在任意路径中驱动或阻止 4 个数量级的速度和体积范围内的液滴. 液滴速度可以达到 ∼2 m/s(2,000 体长/s)。这种策略打破了空间限制,允许液滴沿 3 维 360° 圆移动,并以任何梯度爬升/下坡。报道了在一般固体表面或液体环境中的磁驱动液体操作。


























 京公网安备 11010802027423号
京公网安备 11010802027423号