Autonomous Robots ( IF 3.5 ) Pub Date : 2021-05-04 , DOI: 10.1007/s10514-021-09980-x Povilas Daniušis , Shubham Juneja , Lukas Valatka , Linas Petkevičius
|
Abstract
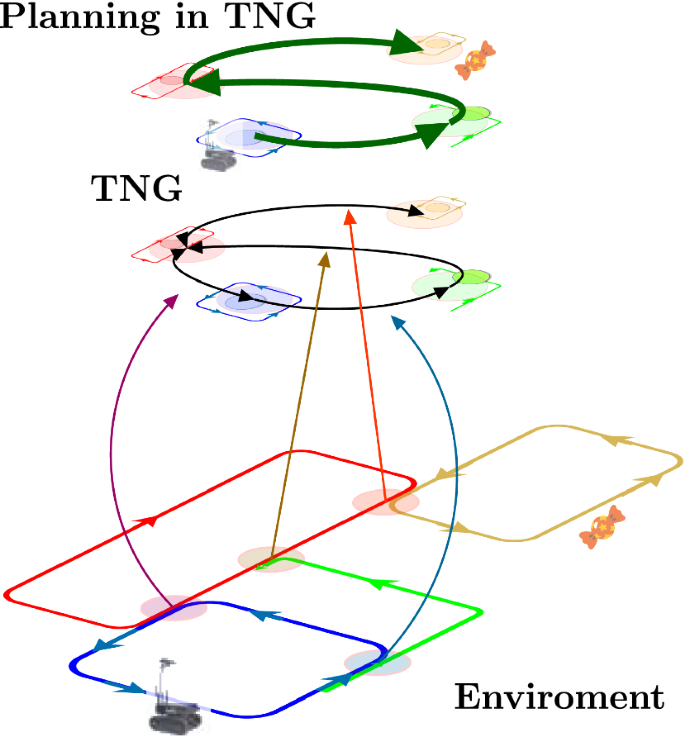
In this paper, we focus on the utilisation of reactive trajectory imitation controllers for goal-directed visual navigation in mobile robotics. We propose topological navigation graph (TNG) framework. TNG is an imitation-learning-based topological navigation framework for navigating through environments with intersecting trajectories. It represents the environment as a directed graph composed of perception and action modules. Each vertex of the graph corresponds to a trajectory and is represented by a trajectory identification classifier and a trajectory imitation controller. The edges of TNG correspond to intersections between trajectories and are represented by trajectory intersection recognition classifiers. Having a visually specified goal state, TNG navigates by forming a sequential composition plan of trajectory imitation controllers. We also propose to apply neural object detection architectures for the task of trajectory following by detecting direction of movement. We provide empirical evaluation of the proposed navigation framework and its components both in simulated and real-world environments and demonstrate that TNG allows us to utilise non-goal-directed, imitation-learning methods for goal-directed autonomous navigation.
Graphic abstract
中文翻译:
拓扑导航图框架
摘要
在本文中,我们专注于在移动机器人技术中将反应轨迹仿制控制器用于目标导向的视觉导航。我们提出了拓扑导航图(TNG)框架。TNG是基于模仿学习的拓扑导航框架,用于在具有相交轨迹的环境中进行导航。它将环境表示为由感知和动作模块组成的有向图。图的每个顶点对应于一条轨迹,并由轨迹识别分类器和轨迹仿制控制器表示。TNG的边缘对应于轨迹之间的交点,并且由轨迹交点识别分类器表示。TNG具有视觉指定的目标状态,它通过形成轨迹模仿控制器的顺序组成计划进行导航。我们还建议通过检测运动方向将神经对象检测体系结构应用于轨迹跟踪任务。我们提供了对拟议的导航框架及其在模拟和现实环境中的组件的实证评估,并证明了TNG允许我们将非目标定向的模仿学习方法用于目标定向的自主导航。

























 京公网安备 11010802027423号
京公网安备 11010802027423号