当前位置:
X-MOL 学术
›
Int. Trans. Electr. Energy Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Sensorless vector control of permanent magnetic synchronous motor with parameter error compensation
International Transactions on Electrical Energy Systems ( IF 2.3 ) Pub Date : 2021-03-14 , DOI: 10.1002/2050-7038.12787 Seyang Pak 1 , Ilyong Kang 1
International Transactions on Electrical Energy Systems ( IF 2.3 ) Pub Date : 2021-03-14 , DOI: 10.1002/2050-7038.12787 Seyang Pak 1 , Ilyong Kang 1
Affiliation
|
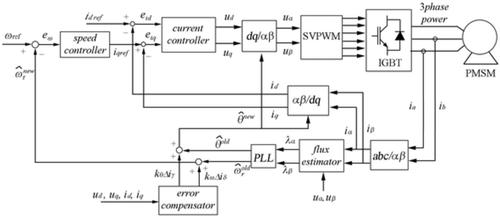
The position sensorless vector control of permanent magnetic synchronous motor is the method that implements the vector control by estimating the rotor position from the motor model in the basis of the voltage and the current signal of the motor without measuring the motor position directly. The sensorless vector control is divided into two methods: estimating the rotor position based on the stationary reference frame and rotational reference frame. This article presents the research results of more improved estimation performance by combining these two methods. First, we estimate the rotor position by using the open‐loop estimation algorithm based on the stationary reference frame, evaluate the estimation error based on the model from the rotational reference frame and compensate the estimate in a feedback way with differences from the current measurements. At the same time, we also take the parameter errors included in the model into account. This article performed the experiment for the parameter identification and for the sensorless vector control, and demonstrated its effectiveness.
中文翻译:

带有参数误差补偿的永磁同步电动机的无传感器矢量控制
永磁同步电动机的无位置传感器矢量控制是一种在不直接测量电动机位置的情况下,根据电动机的电压和电流信号从电动机模型估算转子位置来实现矢量控制的方法。无传感器矢量控制分为两种方法:基于固定参考系和旋转参考系估算转子位置。本文介绍了通过结合这两种方法可以进一步提高估计性能的研究结果。首先,我们使用基于固定参考系的开环估算算法估算转子位置,根据来自旋转参考系的模型评估估算误差,并以反馈方式补偿估算值与当前测量值之间的差异。同时,我们还考虑了模型中包含的参数误差。本文进行了参数识别和无传感器矢量控制的实验,并证明了其有效性。
更新日期:2021-05-03
中文翻译:
带有参数误差补偿的永磁同步电动机的无传感器矢量控制
永磁同步电动机的无位置传感器矢量控制是一种在不直接测量电动机位置的情况下,根据电动机的电压和电流信号从电动机模型估算转子位置来实现矢量控制的方法。无传感器矢量控制分为两种方法:基于固定参考系和旋转参考系估算转子位置。本文介绍了通过结合这两种方法可以进一步提高估计性能的研究结果。首先,我们使用基于固定参考系的开环估算算法估算转子位置,根据来自旋转参考系的模型评估估算误差,并以反馈方式补偿估算值与当前测量值之间的差异。同时,我们还考虑了模型中包含的参数误差。本文进行了参数识别和无传感器矢量控制的实验,并证明了其有效性。

























 京公网安备 11010802027423号
京公网安备 11010802027423号