Control Engineering Practice ( IF 4.9 ) Pub Date : 2021-03-25 , DOI: 10.1016/j.conengprac.2021.104803 Eduardo F. Schmidt , Pedro H.O. Martins , Marcelo L.C. de Oliveira , Alexandre Trofino
|
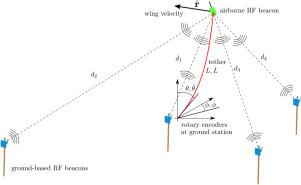
Conventional GPS and encoder-based solutions for the real-time position and velocity tracking of tethered aircraft in airborne wind energy (AWE) systems are known to have some practical limitations. As an alternative, the main contribution of this paper is to present a setup based on 2.4 GHz radio-frequency (RF) devices, for which there are still no reported experimental results in the literature. To this end, four estimation algorithms are formulated to a lateration problem: linear and nonlinear least squares (kinematic approaches), as well as the extended and the unscented Kalman filters (dynamic approaches). The Cramér–Rao lower bound is computed to serve as a benchmark for the filtering performance in terms of the position estimate covariance. Drawbacks of the two kinematic algorithms are discussed, followed by the advantages of using the two Kalman filters in a sensor fusion scheme that uses not only the RF rangings but also line angles and length measurements obtained from rotary encoders at the ground station. Estimates computed from field experimental data acquired with a small-scale AWE prototype are validated against the encoder measurements. The results show that setups based on RF ranging devices have many advantages over more conventional positioning techniques such as those based on line-following mechanisms with encoders, GPS and IMU, and computer vision, representing a promising solution for AWE applications.
中文翻译:
机载风能系统的射频定位
已知用于机载风能(AWE)系统中系留飞机的实时位置和速度跟踪的基于GPS和编码器的常规解决方案存在一些实际限制。作为替代方案,本文的主要贡献是提出一种基于2.4 GHz射频(RF)装置的装置,其文献中仍没有报道过的实验结果。为此,提出了四种估计算法来解决延迟问题:线性和非线性最小二乘法(运动学方法),以及扩展的和无味的卡尔曼滤波器(动态方法)。计算Cramér-Rao下限,以根据位置估计协方差作为滤波性能的基准。讨论了两种运动学算法的缺点,其次是在传感器融合方案中使用两个卡尔曼滤波器的优势,该方案不仅使用RF测距,而且还使用从地面站的旋转编码器获得的线角和长度测量值。根据小规模AWE原型获得的现场实验数据计算得出的估计值将针对编码器测量进行验证。结果表明,基于RF测距设备的设置相对于更常规的定位技术(例如基于带有编码器,GPS和IMU以及计算机视觉的行跟随机制的定位技术)具有许多优势,代表了AWE应用程序的有希望的解决方案。根据小规模AWE原型获得的现场实验数据计算得出的估计值将针对编码器测量进行验证。结果表明,基于RF测距设备的设置相对于更常规的定位技术(例如基于带有编码器,GPS和IMU以及计算机视觉的行跟随机制的定位技术)具有许多优势,代表了AWE应用程序的有希望的解决方案。根据小规模AWE原型获得的现场实验数据计算得出的估计值将针对编码器测量进行验证。结果表明,基于RF测距设备的设置相对于更常规的定位技术(例如基于带有编码器,GPS和IMU以及计算机视觉的行跟随机制的定位技术)具有许多优势,代表了AWE应用程序的有希望的解决方案。


























 京公网安备 11010802027423号
京公网安备 11010802027423号