Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Solar‐Driven Soft Robots
Advanced Science ( IF 15.1 ) Pub Date : 2021-02-22 , DOI: 10.1002/advs.202004235 Seyed M. Mirvakili 1 , Arny Leroy 2 , Douglas Sim 3 , Evelyn N. Wang 2
Advanced Science ( IF 15.1 ) Pub Date : 2021-02-22 , DOI: 10.1002/advs.202004235 Seyed M. Mirvakili 1 , Arny Leroy 2 , Douglas Sim 3 , Evelyn N. Wang 2
Affiliation
|
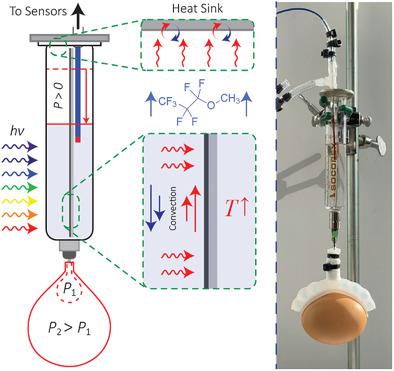
Stimuli‐responsive materials have been lately employed in soft robotics enabling new classes of robots that can emulate biological systems. The untethered operation of soft materials with high power light, magnetic field, and electric field has been previously demonstrated. While electric and magnetic fields can be stimulants for untethered actuation, their rapid decay as a function of distance limits their efficacy for long‐range operations. In contrast, light—in the form of sunlight or collimated from an artificial source (e.g., laser, Xenon lamps)—does not decay rapidly, making it suitable for long‐range excitation of untethered soft robots. In this work, an approach to harnessing sunlight for the untethered operation of soft robots is presented. By employing a selective solar absorber film and a low‐boiling point (34 °C) fluid, light‐operated soft robotic grippers are demonstrated, grasping and lifting objects almost 25 times the mass of the fluid in a controllable fashion. The method addresses one of the salient challenges in the field of untethered soft robotics. It precludes the use of bulky peripheral components (e.g., compressors, valves, or pressurized gas tank) and enables the untethered long‐range operation of soft robots.
中文翻译:

太阳能驱动的软机器人
刺激响应材料最近已被用于软机器人中,从而使新型的可模拟生物系统的机器人成为可能。先前已经证明了具有高功率光,磁场和电场的软材料的束缚操作。尽管电场和磁场可以成为不受束缚的驱动力的刺激物,但它们的快速衰减随距离而变会限制其在远距离操作中的功效。相比之下,太阳光或人造光源(例如激光,氙气灯)准直的光不会迅速衰减,因此适合于不受束缚的软机器人的远距离激励。在这项工作中,提出了一种利用阳光进行软机器人的不受束缚操作的方法。通过采用选择性的太阳能吸收膜和低沸点(34°C)的流体,演示了轻巧的软机器人抓手,该抓手可控地抓取和提起几乎是流体质量25倍的物体。该方法解决了不受束缚的软机器人领域中的显着挑战之一。它可以避免使用笨重的外围组件(例如,压缩机,阀门或加压气罐),并且可以使软机器人不受束缚地进行远程操作。
更新日期:2021-04-22
中文翻译:
太阳能驱动的软机器人
刺激响应材料最近已被用于软机器人中,从而使新型的可模拟生物系统的机器人成为可能。先前已经证明了具有高功率光,磁场和电场的软材料的束缚操作。尽管电场和磁场可以成为不受束缚的驱动力的刺激物,但它们的快速衰减随距离而变会限制其在远距离操作中的功效。相比之下,太阳光或人造光源(例如激光,氙气灯)准直的光不会迅速衰减,因此适合于不受束缚的软机器人的远距离激励。在这项工作中,提出了一种利用阳光进行软机器人的不受束缚操作的方法。通过采用选择性的太阳能吸收膜和低沸点(34°C)的流体,演示了轻巧的软机器人抓手,该抓手可控地抓取和提起几乎是流体质量25倍的物体。该方法解决了不受束缚的软机器人领域中的显着挑战之一。它可以避免使用笨重的外围组件(例如,压缩机,阀门或加压气罐),并且可以使软机器人不受束缚地进行远程操作。


























 京公网安备 11010802027423号
京公网安备 11010802027423号