Nano Energy ( IF 17.6 ) Pub Date : 2021-02-17 , DOI: 10.1016/j.nanoen.2021.105896 Guoqing Jin , Yuyang Sun , Jiangjun Geng , Xin Yuan , Tao Chen , Huicong Liu , Fengxia Wang , Lining Sun
|
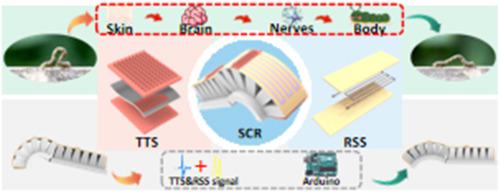
Soft robots have significant advantages in terms of flexibility and adaptability, leading to potential applications in the bionics field. Inspired by the caterpillars in nature, this work proposed a soft caterpillar robot (SCR) by integrating two types of ultra-stretchable bionic sensors on a dual air-chamber pneumatic network structure. In order to realize self-powered tactile sensing, four triboelectric nanogenerator tactile sensors (TTSs) based on functional liquid metal (FLM) with thorny-structured bionic whiskers are developed and attached on the SCR. Meanwhile, two ultra-stretchable resistive strain sensors (RSSs) by using FLM are covered as the bionic skin to sense self-body deformation of the SCR. The TTS has a fast response time of 0.03 s and a minimum perception of 0.05 kPa, which can be very sensitive to the unknown stimulus of various materials. The RSS with a relatively high sensitivity of 2.94 and small hysteresis of 1.42% possess the ultra-stretchable ability of 180% strain, which helps to adapt and adjust its own body bending and crawling. The biological perception capabilities of the SCR play a crucial role in mimicking bionic actions and response in an unknown environment, such as escaping from unexpected attacks as well as adaptive crawling through an unknown tunnel environment.
中文翻译:
具有生物功能的软履带机器人,具有基于功能性液态金属的超拉伸仿生传感器
软机器人在灵活性和适应性方面具有显着优势,从而导致了其在仿生学领域的潜在应用。受自然界的毛毛虫启发,这项工作提出了一种软毛毛虫机器人(SCR),它将两种类型的超拉伸仿生传感器集成在双气室气动网络结构上。为了实现自供电的触觉传感,已开发了四个基于功能性液态金属(FLM)和棘手结构仿生晶须的摩擦式纳米发电机触觉传感器(TTS),并将其安装在SCR上。同时,两个使用FLM的超拉伸电阻应变传感器(RSS)被覆盖为仿生皮肤,以感测SCR的自身变形。TTS的响应时间为0.03 s,最小感知值为0.05 kPa,这可能对各种材料的未知刺激非常敏感。RSS具有2.94的较高灵敏度和1.42%的滞后性,具有180%应变的超拉伸能力,有助于适应和调整自身的身体弯曲和爬行。SCR的生物感知能力在模仿未知环境中的仿生动作和响应中起着至关重要的作用,例如逃避意外攻击以及在未知隧道环境中进行自适应爬行。
























 京公网安备 11010802027423号
京公网安备 11010802027423号