Computers & Graphics ( IF 2.5 ) Pub Date : 2021-01-21 , DOI: 10.1016/j.cag.2021.01.004 Sindhu Hegde , Shankar Gangisetty
|
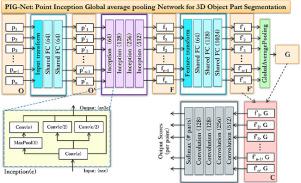
Point clouds, being the simple and compact representation of surface geometry of 3D objects, have gained increasing popularity with the evolution of deep learning networks for classification and segmentation tasks. Unlike human, teaching the machine to analyze the segments of an object is a challenging task and quite essential in various machine vision applications. In this paper, we address the problem of segmentation and labelling of the 3D point clouds by proposing a inception based deep network architecture called PIG-Net, that effectively characterizes the local and global geometric details of the point clouds. In PIG-Net, the local features are extracted from the transformed input points using the proposed inception layers and then aligned by feature transform. These local features are aggregated using the global average pooling layer to obtain the global features. Finally, feed the concatenated local and global features to the convolution layers for segmenting the 3D point clouds. We perform an exhaustive experimental analysis of the PIG-Net architecture on two state-of-the-art datasets, namely, ShapeNet [1] and PartNet [2]. We evaluate the effectiveness of our network by performing ablation study.
中文翻译:
PIG-Net:用于3D点云分割的基于Inception的深度学习架构
点云是3D对象表面几何的简单而紧凑的表示形式,随着用于分类和分割任务的深度学习网络的发展,其越来越受欢迎。与人类不同,教机器分析对象的片段是一项艰巨的任务,并且在各种机器视觉应用中都非常重要。在本文中,我们通过提出一种称为PIG-Net的基于初始的深度网络体系结构来解决3D点云的分割和标记问题,该体系结构有效地表征了点云的局部和全局几何细节。在PIG-Net中,使用建议的起始层从转换后的输入点中提取局部特征,然后通过特征变换进行对齐。使用全局平均池化层聚合这些局部特征以获得全局特征。最后,将级联的局部和全局要素馈送到卷积层以分割3D点云。我们在两个最新的数据集ShapeNet [1]和PartNet [2]上对PIG-Net架构进行了详尽的实验分析。我们通过进行消融研究评估网络的有效性。

























 京公网安备 11010802027423号
京公网安备 11010802027423号