当前位置:
X-MOL 学术
›
Trans. Emerg. Telecommun. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Ground target finding mechanism for unmanned aerial vehicles to secure crop field data
Transactions on Emerging Telecommunications Technologies ( IF 3.6 ) Pub Date : 2021-01-10 , DOI: 10.1002/ett.4210 Mohammad Ammad Uddin 1, 2 , Muhammad Ayaz 1, 2 , Ali Mansour 2 , El‐Hadi M. Aggoune 1 , Ahmad Hani El Fawal 2 , Imran Razzak 3
Transactions on Emerging Telecommunications Technologies ( IF 3.6 ) Pub Date : 2021-01-10 , DOI: 10.1002/ett.4210 Mohammad Ammad Uddin 1, 2 , Muhammad Ayaz 1, 2 , Ali Mansour 2 , El‐Hadi M. Aggoune 1 , Ahmad Hani El Fawal 2 , Imran Razzak 3
Affiliation
|
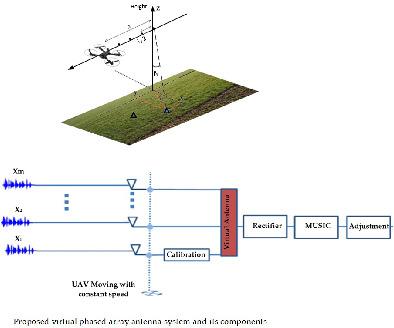
Unmanned aerial vehicles (UAVs) are being used in many military and civil applications while their use along wireless sensors is emerging abruptly as it upgrades the network in terms of reliability, lifetime, and connectivity. The system performance and throughput can be further enhanced if the UAVs in use are capable to locate ground sensor nodes as a means to address them smartly. In typically localization, the direction of arrival of incoming signals from a target node is measured by using a uniformed linear array (ULA) of antennas having signal processing capabilities. However, adding numerous antennas (transmitter receivers set) on a UAV is an extra burden which ultimately effects its speed, flight time, agility, and payload capacity. Considering the issue, a typical ULA antenna system is modeled by using virtual phased array (VPA) antenna. In the proposed VPA, a single antenna installed on a moving UAV will achieve the desire results. The well‐known multiple signal classification algorithm is modified to adapt this virtual antenna system. Four extra modules including calibrator, virtual antenna, rectifier, and adjustment are added in classical multiple signal classification algorithm to make it enable to work with single antenna. The proposed system mitigates the existing challenges of physical ULA and improves system throughput. Furthermore, due to its virtualness, VPA can adjust the number of antenna elements and interelement spacing, which adds multifrequency support and adaptive precision mechanism. A simulation model is developed in MATLAB to verify the performance of the VPA where the proposed system is evaluated against different scenarios with a varying number of parameters. It is found that VPA gives the same resolution and precision as a physical ULA antenna but it is more flexible, user‐friendly, cost‐effective, reliable, and most importantly, does not affect the UAV characteristics.
中文翻译:

无人驾驶飞机的地面目标寻找机制可确保作物田地数据的安全
无人飞行器(UAV)已用于许多军事和民用应用中,但随着其在可靠性,寿命和连接性方面升级网络,其在无线传感器中的使用正在突然兴起。如果使用中的无人机能够定位地面传感器节点作为智能寻址的手段,则可以进一步提高系统性能和吞吐量。在典型的定位中,通过使用具有信号处理能力的天线的均匀线性阵列(ULA)来测量来自目标节点的传入信号的到达方向。然而,在无人飞行器上增加许多天线(发射机接收机组)是一个额外的负担,最终会影响其速度,飞行时间,敏捷性和有效载荷容量。考虑到该问题,典型的ULA天线系统是通过使用虚拟相控阵(VPA)天线建模的。在提出的VPA中,安装在移动的无人机上的单个天线将达到预期的效果。修改了著名的多信号分类算法以适应该虚拟天线系统。经典的多信号分类算法中添加了四个额外的模块,包括校准器,虚拟天线,整流器和调节器,从而使其能够与单天线一起工作。所提出的系统减轻了物理ULA的现有挑战,并提高了系统吞吐量。此外,由于其虚拟性,VPA可以调整天线元件的数量和元件间距,从而增加了多频支持和自适应精度机制。在MATLAB中开发了一个仿真模型,以验证VPA的性能,在该VPA中,针对所提出的系统针对具有不同数量参数的不同方案进行了评估。
更新日期:2021-03-15
中文翻译:
无人驾驶飞机的地面目标寻找机制可确保作物田地数据的安全
无人飞行器(UAV)已用于许多军事和民用应用中,但随着其在可靠性,寿命和连接性方面升级网络,其在无线传感器中的使用正在突然兴起。如果使用中的无人机能够定位地面传感器节点作为智能寻址的手段,则可以进一步提高系统性能和吞吐量。在典型的定位中,通过使用具有信号处理能力的天线的均匀线性阵列(ULA)来测量来自目标节点的传入信号的到达方向。然而,在无人飞行器上增加许多天线(发射机接收机组)是一个额外的负担,最终会影响其速度,飞行时间,敏捷性和有效载荷容量。考虑到该问题,典型的ULA天线系统是通过使用虚拟相控阵(VPA)天线建模的。在提出的VPA中,安装在移动的无人机上的单个天线将达到预期的效果。修改了著名的多信号分类算法以适应该虚拟天线系统。经典的多信号分类算法中添加了四个额外的模块,包括校准器,虚拟天线,整流器和调节器,从而使其能够与单天线一起工作。所提出的系统减轻了物理ULA的现有挑战,并提高了系统吞吐量。此外,由于其虚拟性,VPA可以调整天线元件的数量和元件间距,从而增加了多频支持和自适应精度机制。在MATLAB中开发了一个仿真模型,以验证VPA的性能,在该VPA中,针对所提出的系统针对具有不同数量参数的不同方案进行了评估。

























 京公网安备 11010802027423号
京公网安备 11010802027423号