Mechanism and Machine Theory ( IF 5.2 ) Pub Date : 2020-12-29 , DOI: 10.1016/j.mechmachtheory.2020.104220 Merlin Morlock , Niklas Meyer , Marc-André Pick , Robert Seifried
|
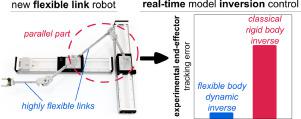
Real-time end-effector trajectory tracking is applied to a newly developed parallel robotic system with two highly flexible links. In contrast to previous works, which are typically based on offline precalculations or rigid model inversion, a dynamic flexible multibody model is inverted online. As the underactuated system is non-minimum phase, the inverse model needs to be rendered stable for real-time integration. Therefore, three approaches are developed for the considered robot. Firstly, output redefinition is applied by directly weighting the elastic deformations and rotations of the links. Secondly, a small counter weight is attached at an advantageous location on the robot having only a minor influence on the eigenfrequencies. Lastly, the rotational degree of freedom of the end-effector is used to stabilize the internal dynamics of the inverse model with a small motion of a rotary motor. The concepts and real-time applicability are validated within experiments which extends the related literature being highly based on theoretical investigations. The experimental end-effector tracking performance based on the three minimum phase approaches is close to the desired trajectory and clearly outperforms classical rigid body inversion.
中文翻译:
具有灵活链接的并行机器人的实时轨迹跟踪控制
实时末端执行器轨迹跟踪应用于具有两个高度灵活链接的新开发的并行机器人系统。与通常基于离线预计算或刚性模型反演的先前工作相比,动态柔性多体模型在线反演。由于欠驱动系统是非最小相位,因此需要使逆模型稳定以进行实时集成。因此,针对所考虑的机器人开发了三种方法。首先,通过直接加权链接的弹性变形和旋转来应用输出重新定义。其次,将较小的配重安装在机器人上的有利位置,该位置对本征频率的影响很小。最后,端部执行器的旋转自由度用于在旋转电机运动较小的情况下稳定逆模型的内部动力学。这些概念和实时适用性在实验中得到了验证,这些实验在理论研究的基础上高度扩展了相关文献。基于三个最小相位方法的实验性末端执行器跟踪性能接近所需的轨迹,并且明显优于经典的刚体反演。


























 京公网安备 11010802027423号
京公网安备 11010802027423号