Mechanical Systems and Signal Processing ( IF 8.4 ) Pub Date : 2020-12-24 , DOI: 10.1016/j.ymssp.2020.107538 Dongyi Hu , Junqiang Lou , Tehuan Chen , Yiling Yang , Chao Xu , Hairong Chen , Yuguo Cui
|
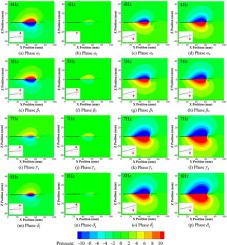
The design and realization of underwater bionic robots actuated by smart materials have attracted growing attention in recent years. The experimental acquisition of the dynamic thrust force is crucial for the development of underwater robots. A simple micro thrust measurement system based on a decoupled lever mechanism is designed for a macro fiber composite (MFC)-actuated bionic robotic fish. The pressure field distribution and evolution associated with the thrust variation induced by the oscillating caudal fin of the robotic fish are visualized using computational fluid dynamics (CFD) technologies. A miniature MFC-actuated robotic fish that mimics the koi fish is designed. A simple decoupled lever mechanism with excellent linearity, high precision and resolution, and the ability to minimize the interference from the lateral force is proposed. Calibration results indicate that the output sensitivity of the designed measurement apparatus is 5.48 mN/V. The dynamic variations in the micro thrust generated by the robotic fish at different actuation levels are effectively captured using the proposed measurement system. Experimental results show that the MFC-actuated robotic fish obtains a maximum mean thrust of −2.95 mN in the case of the greatest tip oscillating velocity, which is consistent with Lighthill’s elongated-body theory. Moreover, for the robotic fish, the maximum instant thrust grows with an increase in the oscillating frequency. The maximum instant drag first decreases, and then increases as the actuation frequency increases. It reaches its minimum value of 0.37 mN in the case of the maximum oscillating velocity. In contrast, the variation behavior of the thrust pattern/oscillating period is the reverse to that of the maximum instant drag, and it obtains a maximum of 85.7%. The propulsion performance indexes of the robotic fish in the CFD simulations match those of experimental results for different oscillating cases. Furthermore, the distribution and evolution mechanisms of the steady pressure fields around the oscillating robotic fish are revealed. The CFD simulations demonstrate that the variations in the instant thrust could be fully determined by the distributions and intensities of the concentrated pressure regions induced by the oscillating caudal fin. The cycle-averaged velocity fields around the caudal fin are closely related to the mean thrust generated by the MFC-actuated robotic fish. Accordingly, these results may be helpful in the development of underwater bionic robots actuated by smart actuators.
中文翻译:
宏观纤维复合材料谐波激励下仿生机器人鱼微推力测量实验及压力场演化
近年来,由智能材料驱动的水下仿生机器人的设计和实现引起了越来越多的关注。动态推力的实验获取对于水下机器人的开发至关重要。一个简单的基于推杆杠杆机制的微推力测量系统被设计用于由大型纤维复合材料(MFC)驱动的仿生机器人鱼。使用计算流体力学(CFD)技术可视化与由机器鱼的振荡尾鳍引起的推力变化相关的压力场分布和演变。设计了一种由MFC驱动的模仿锦鲤鱼的机器人鱼。提出了一种简单的解耦杠杆机构,该机构具有出色的线性度,高精度和分辨率,并具有最小化横向力干扰的能力。校准结果表明,设计的测量设备的输出灵敏度为5.48 mN / V。使用所提出的测量系统,可以有效地捕获机器人鱼在不同致动水平下产生的微推力的动态变化。实验结果表明,在最大叶尖振荡速度的情况下,由MFC驱动的机器鱼获得的最大平均推力为-2.95 mN,这与Lighthill的细长体理论是一致的。此外,对于机器鱼,最大瞬时推力随着振荡频率的增加而增长。最大瞬时阻力首先减小,然后随着致动频率的增加而增加。在最大振荡速度的情况下,它达到最小值0.37 mN。相反,推力模式/振荡周期的变化行为与最大瞬时阻力相反,其最大值为85.7%。CFD仿真中机器人鱼的推进性能指标与不同振荡情况下的实验结果相匹配。此外,揭示了振荡的机器鱼周围的稳态压力场的分布和演化机理。CFD模拟表明,瞬时推力的变化可以完全由振荡的尾鳍引起的集中压力区域的分布和强度确定。尾鳍周围的周期平均速度场与由MFC驱动的机器鱼产生的平均推力密切相关。因此,

























 京公网安备 11010802027423号
京公网安备 11010802027423号