当前位置:
X-MOL 学术
›
Macromol. Rapid Commun.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
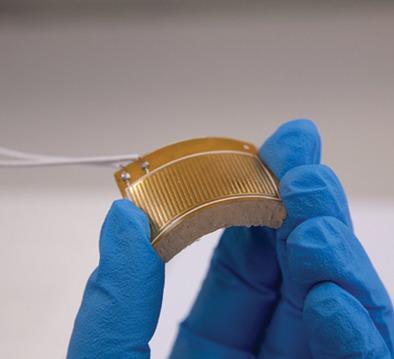
Interdigitated Sensor Based on a Silicone Foam for Subtle Robotic Manipulation
Macromolecular Rapid Communications ( IF 4.6 ) Pub Date : 2020-12-04 , DOI: 10.1002/marc.202000560 Masoumeh Hesam Mahmoudinezhad 1 , Iain Anderson 1 , Samuel Rosset 1
Macromolecular Rapid Communications ( IF 4.6 ) Pub Date : 2020-12-04 , DOI: 10.1002/marc.202000560 Masoumeh Hesam Mahmoudinezhad 1 , Iain Anderson 1 , Samuel Rosset 1
Affiliation
|
In this contribution, a soft sensor configuration based on silicone foam is developed to measure compressive forces in the range of 50 N with the aim of providing proprioceptive capabilities to conventional robotic manipulators based on hard materials. This then makes them capable of interacting with soft and fragile objects without damage. The concept relies on interdigitated electrodes that are patterned on the backside of the sensor to generate a fringing electric field into a soft compressible polymeric foam. The deformation of the foam causes changes to relative permittivity as the air‐filled cells compress. The model in this article shows how the different parameters of the foam, such as air volume fraction, permittivity, and Young's modulus, affect the stiffness and electrical sensitivity of the sensor, and how controlling the porosity of the foam is key to optimizing the sensitivity of the sensor. This sensor is easy to fabricate and does not require compliant electrodes, while exhibiting high sensitivity values of 33% capacitance change for as little as 10 N applied force.
中文翻译:

基于硅泡沫的叉指式传感器,可实现精细的机器人操纵
为此,开发了一种基于有机硅泡沫的软传感器配置,以测量50 N范围内的压力,目的是为基于硬质材料的传统机械手提供本体感受能力。这样,它们便能够与柔软易碎的物体相互作用而不会受到损坏。该概念依赖于在电极背面图案化的叉指电极,以将边缘电场产生到柔软的可压缩聚合物泡沫中。泡沫变形会随着充气小室的压缩而引起相对介电常数的变化。本文中的模型显示了泡沫的不同参数(例如空气体积分数,介电常数和杨氏模量)如何影响传感器的刚度和电灵敏度,以及如何控制泡沫的孔隙率是优化传感器灵敏度的关键。该传感器易于制造,不需要柔顺的电极,而对于10 N的外加力,其电容变化却表现出33%的高灵敏度值。
更新日期:2020-12-04
中文翻译:
基于硅泡沫的叉指式传感器,可实现精细的机器人操纵
为此,开发了一种基于有机硅泡沫的软传感器配置,以测量50 N范围内的压力,目的是为基于硬质材料的传统机械手提供本体感受能力。这样,它们便能够与柔软易碎的物体相互作用而不会受到损坏。该概念依赖于在电极背面图案化的叉指电极,以将边缘电场产生到柔软的可压缩聚合物泡沫中。泡沫变形会随着充气小室的压缩而引起相对介电常数的变化。本文中的模型显示了泡沫的不同参数(例如空气体积分数,介电常数和杨氏模量)如何影响传感器的刚度和电灵敏度,以及如何控制泡沫的孔隙率是优化传感器灵敏度的关键。该传感器易于制造,不需要柔顺的电极,而对于10 N的外加力,其电容变化却表现出33%的高灵敏度值。

























 京公网安备 11010802027423号
京公网安备 11010802027423号