Sensors and Actuators A: Physical ( IF 4.6 ) Pub Date : 2020-11-25 , DOI: 10.1016/j.sna.2020.112470 Fang Chen , Dacheng Xu , Wei Zhou , Michael Kraft , Xinxin Li
|
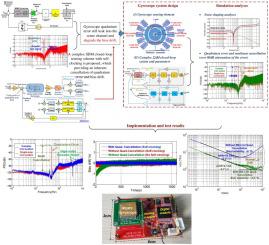
In this work, a new self-clocking electromechanical sigma-delta modulator (ƩΔM) quadrature error cancellation scheme for MEMS mode-matching gyroscopes is presented. The proposed techniques allow to decompose the gyroscope sense mode into in- and quadrature-phase signals and process it with two high-order sigma-delta control loops, achieving efficient noise shaping and error suppression. Furthermore, the system was designed with a self-clocking calibration scheme to provide temperature-independent turn-on bias output. Simulation results proved its robustness, a significant improvement for linearity and achieving over 80 dB attenuation of quadrature error. The hardware implementation comprising a discrete interface circuit and a wheel gyroscope was demonstrated. Measurement results validate the inherent loop quadrature cancellation scheme and demonstrate a sub-1°/hr bias instability (BI), with 5.5X and 3X improvement of BI and angle random walk (ARW) compared with a conventional single-loop ƩΔM gyroscope system. Combined with real-time self-clocking control, it yields an improvement of turn on bias error (1800s) and output linearity, achieving 1°/h and 0.021 %, respectively.
中文翻译:
具有正交误差消除的离散时间自计时复机电ƩΔM陀螺仪
在这项工作中,提出了一种用于MEMS模式匹配陀螺仪的新的自计时机电sigma-delta调制器(ƩΔM)正交误差消除方案。所提出的技术允许将陀螺仪感测模式分解为同相和正交相位信号,并使用两个高阶sigma-delta控制回路对其进行处理,从而实现有效的噪声整形和误差抑制。此外,该系统设计有自时钟校准方案,以提供与温度无关的导通偏置输出。仿真结果证明了其鲁棒性,线性度的显着提高以及正交误差的衰减超过80 dB。演示了包括分立接口电路和轮式陀螺仪的硬件实现。测量结果验证了固有的环路正交消除方案,并证明了低于1°/小时的偏置不稳定性(BI),与传统的单环路ΔΔM陀螺仪系统相比,BI和角度随机游走(ARW)分别提高了5.5倍和3倍。结合实时自时钟控制,可改善导通偏置误差(1800s)和输出线性度,分别达到1°/ h和0.021%。

























 京公网安备 11010802027423号
京公网安备 11010802027423号