当前位置:
X-MOL 学术
›
J. Morphol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
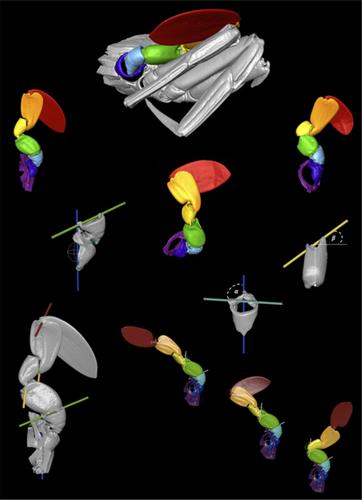
Kinematics and morphology: A comparison of 3D ‐patterns in the fifth pereiopod of swimming and non‐swimming crab species (Malacostraca, Decapoda, Brachyura)
Journal of Morphology ( IF 1.5 ) Pub Date : 2020-10-27 , DOI: 10.1002/jmor.21268 Michel Schmidt 1 , Dennis Hazerli 1 , Stefan Richter 1
Journal of Morphology ( IF 1.5 ) Pub Date : 2020-10-27 , DOI: 10.1002/jmor.21268 Michel Schmidt 1 , Dennis Hazerli 1 , Stefan Richter 1
Affiliation
|
Swimming crabs of the taxon Portunoidea show specialized, paddle‐shaped fifth pereiopods (P5), which play a role in these crabs' ability to swim. In this study, the morphology of the fifth pereiopod in swimming and non‐swimming crabs was studied in detail and the mobility in the articulations between podomeres was calculated from reconstructed three‐dimensional (3D)‐models. This way, we aimed to provide new estimates of kinematic parameters, and to answer the question on a possible homology of the P5 within several portunoid clades. We measured and compared podomere length ratios, orientations of the joint axes, and modeled single range of motion (sROM) of each joint as well as the total range of motion (tROM) of all joints of the P5 as a whole. Seven Portunoidea species, four of them belonging to the P5‐swimming crab morphotype (Liocarcinus depurator, Polybius henslowii, Callinectes sapidus, Portunus pelagicus) and three not belonging to this morphotype (Carcinus aestuarii, Portumnus latipes, and with uncertain status Carupa tenuipes) were compared with the non‐portunoids Sternodromia monodi, Ranina ranina, Raninoides bouvieri, Eriocheir sinensis, Varuna litterata, Ashtoret lunaris, and Cancer pagurus. The study was carried out using a combination of microcomputer tomography (μCT)‐techniques and 3D‐reconstructions. The μCT‐data were used to create surface models of the P5 in Amira, which were then 3D‐animated and manipulated in Maya to qualitatively compare modeled kinematic parameters. Results show that the merus and carpus in swimming crabs are shorter than in non‐swimming crabs, while sROM angles are generally larger. The tROM of all joints expressed as Euclidean distances is generally higher in the portunoids (except for Carcinus). Our comparison of the complete trajectory of the dactylus tip regarding all maximum joint positions of the studied species suggests that the P5‐swimming leg might have evolved once in the Portunoidea and got lost afterward in certain clades.
中文翻译:

运动学和形态学:游泳和非游泳蟹类(Malacostraca、Decapoda、Brachyura)第五足足的 3D 模式比较
分类群 Portunoidea 的游泳蟹显示出特殊的桨状第五足类动物 (P5),这在这些螃蟹的游泳能力中发挥作用。在这项研究中,详细研究了游泳和非游泳蟹中第五足足的形态,并根据重建的三维 (3D) 模型计算了足球之间关节的活动性。通过这种方式,我们旨在提供对运动学参数的新估计,并回答关于几个 portunoid 进化枝中 P5 可能同源性的问题。我们测量并比较了足球长度比、关节轴的方向,并模拟了每个关节的单一运动范围 (sROM) 以及整个 P5 的所有关节的总运动范围 (tROM)。七种 Portunoidea,其中四种属于 P5 型游蟹形态型(Liocarcinus depurator、Polybius henslowii、Callinectes sapidus、Portunus pelagicus)和三种不属于这种形态型的(Carcinus aestuarii、Portumnus latipes 和状态不确定的 Carupa tenuipes) ‐portunoids Sternodromia monodi、Ranina ranina、Raninoides bouvieri、Eriocheir sinensis、Varuna litterata、Ashtoret lunaris 和 Cancer pagurus。该研究结合了微计算机断层扫描 (μCT) 技术和 3D 重建技术。μCT 数据用于在 Amira 中创建 P5 的表面模型,然后在 Maya 中进行 3D 动画和操作,以定性比较建模的运动学参数。结果表明,游泳蟹的腕骨和腕骨比非游泳蟹短,而 sROM 角度通常更大。所有关节的 tROM 表示为欧几里得距离通常在 portunoids 中更高(除了 Carcinus)。我们将指尖的完整轨迹与所研究物种的所有最大关节位置的比较表明,P5 游动腿可能在 Portunoidea 中进化过一次,然后在某些进化枝中消失了。
更新日期:2020-10-27
中文翻译:
运动学和形态学:游泳和非游泳蟹类(Malacostraca、Decapoda、Brachyura)第五足足的 3D 模式比较
分类群 Portunoidea 的游泳蟹显示出特殊的桨状第五足类动物 (P5),这在这些螃蟹的游泳能力中发挥作用。在这项研究中,详细研究了游泳和非游泳蟹中第五足足的形态,并根据重建的三维 (3D) 模型计算了足球之间关节的活动性。通过这种方式,我们旨在提供对运动学参数的新估计,并回答关于几个 portunoid 进化枝中 P5 可能同源性的问题。我们测量并比较了足球长度比、关节轴的方向,并模拟了每个关节的单一运动范围 (sROM) 以及整个 P5 的所有关节的总运动范围 (tROM)。七种 Portunoidea,其中四种属于 P5 型游蟹形态型(Liocarcinus depurator、Polybius henslowii、Callinectes sapidus、Portunus pelagicus)和三种不属于这种形态型的(Carcinus aestuarii、Portumnus latipes 和状态不确定的 Carupa tenuipes) ‐portunoids Sternodromia monodi、Ranina ranina、Raninoides bouvieri、Eriocheir sinensis、Varuna litterata、Ashtoret lunaris 和 Cancer pagurus。该研究结合了微计算机断层扫描 (μCT) 技术和 3D 重建技术。μCT 数据用于在 Amira 中创建 P5 的表面模型,然后在 Maya 中进行 3D 动画和操作,以定性比较建模的运动学参数。结果表明,游泳蟹的腕骨和腕骨比非游泳蟹短,而 sROM 角度通常更大。所有关节的 tROM 表示为欧几里得距离通常在 portunoids 中更高(除了 Carcinus)。我们将指尖的完整轨迹与所研究物种的所有最大关节位置的比较表明,P5 游动腿可能在 Portunoidea 中进化过一次,然后在某些进化枝中消失了。


























 京公网安备 11010802027423号
京公网安备 11010802027423号