Sensors and Actuators A: Physical ( IF 4.6 ) Pub Date : 2020-10-28 , DOI: 10.1016/j.sna.2020.112396 Rajesh R.J. , Yuri Shtessel , Christopher Edwards
|
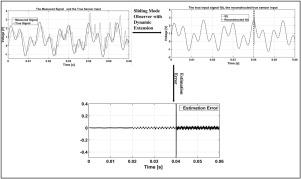
Sensor dynamics adversely affect the accuracy of the obtained measurement by dynamically distorting the true value. The accuracy of the measurement may be further degraded by noise/exogenous signals. In this paper, the accuracy of dynamic sensors is improved by reconstructing/estimating the true input signal measured by the dynamic sensor, from the corrupted output measurement, using sliding mode observers (SMO). The proposed SMO algorithm is based on a novel dynamically extended equivalent injection term. In the absence of the measurement corruption term, the sensor dynamics are compensated, and the measured signal is exactly reconstructed/estimated in finite time. When the dynamic sensor is perturbed, and the measurement is corrupted by exogenous signals, the true input signal reconstruction error is computed. A case study, reconstructing the true input signal of the planar metal-polymer composite sensor, illustrates the efficacy of the proposed SMO algorithm.
中文翻译:
使用具有动态扩展的滑模观察器提高动态传感器的精度
传感器动态性会通过使真实值动态失真而对获得的测量精度产生不利影响。噪声/外源信号可能会进一步降低测量精度。在本文中,通过使用滑模观测器(SMO)从损坏的输出测量值中重建/估算由动态传感器测量的真实输入信号,可以提高动态传感器的精度。提出的SMO算法基于一种新颖的动态扩展等效注入项。在没有测量损坏项的情况下,可以补偿传感器的动态特性,并且可以在有限的时间内准确地重建/估算被测信号。当动态传感器受到干扰,并且测量因外来信号而损坏时,将计算出真实的输入信号重构误差。案例研究重建了平面金属-聚合物复合传感器的真实输入信号,说明了所提出的SMO算法的有效性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号