当前位置:
X-MOL 学术
›
Mechatronics
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Influence of design parameters on the effectiveness of friction isolators in mitigating pre-motion friction in mechanical bearings
Mechatronics ( IF 3.3 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.mechatronics.2020.102444 Xin Dong , Chinedum E. Okwudire
Mechatronics ( IF 3.3 ) Pub Date : 2020-11-01 , DOI: 10.1016/j.mechatronics.2020.102444 Xin Dong , Chinedum E. Okwudire
|
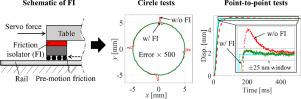
Abstract Mechanical bearings (i.e., sliding and rolling bearings) are widely used for motion guidance in precision positioning stages due to their low cost, high off-axis stiffness and vacuum compatibility. However, mechanical-bearing-guided stages suffer from the presence of pre-motion (i.e., pre-sliding/pre-rolling) friction which adversely affects their positioning speed and motion precision. Friction isolator has been proposed as a low-cost and robust method for mitigating the undesirable effects of pre-motion friction. It has been experimentally demonstrated that a stage with friction isolator achieves significantly reduced settling times and motion errors in point-to-point positioning and tracking applications, respectively. This paper investigates the influence of design parameters on the effectiveness of friction isolators. Experiments are carried out using three isolators with different parameters to evaluate the settling time and in-position stability during point-to-point motions, and the accuracy and robustness of feedforward friction compensation during circular tracking motions. The experimental investigation is generalized through numerical simulation and frequency domain analysis using a simple model of a friction-isolated stage under the influence of pre-motion friction. Generalized design guidelines are provided based on the observed tradeoffs between different performance metrics (e.g., precision, speed).
中文翻译:

设计参数对摩擦隔振器减轻机械轴承运动前摩擦的有效性的影响
摘要 机械轴承(即滑动轴承和滚动轴承)以其低成本、高离轴刚度和真空兼容性而被广泛用于精密定位平台的运动引导。然而,机械轴承引导的平台存在预运动(即预滑动/预滚动)摩擦,这会对它们的定位速度和运动精度产生不利影响。摩擦隔离器已被提议作为一种低成本且稳健的方法,用于减轻运动前摩擦的不良影响。实验证明,带摩擦隔离器的平台分别在点对点定位和跟踪应用中显着减少了稳定时间和运动误差。本文研究了设计参数对摩擦隔振器有效性的影响。使用三个不同参数的隔离器进行实验,以评估点对点运动过程中的稳定时间和就位稳定性,以及圆周跟踪运动过程中前馈摩擦补偿的准确性和鲁棒性。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。
更新日期:2020-11-01
中文翻译:
设计参数对摩擦隔振器减轻机械轴承运动前摩擦的有效性的影响
摘要 机械轴承(即滑动轴承和滚动轴承)以其低成本、高离轴刚度和真空兼容性而被广泛用于精密定位平台的运动引导。然而,机械轴承引导的平台存在预运动(即预滑动/预滚动)摩擦,这会对它们的定位速度和运动精度产生不利影响。摩擦隔离器已被提议作为一种低成本且稳健的方法,用于减轻运动前摩擦的不良影响。实验证明,带摩擦隔离器的平台分别在点对点定位和跟踪应用中显着减少了稳定时间和运动误差。本文研究了设计参数对摩擦隔振器有效性的影响。使用三个不同参数的隔离器进行实验,以评估点对点运动过程中的稳定时间和就位稳定性,以及圆周跟踪运动过程中前馈摩擦补偿的准确性和鲁棒性。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。在运动前摩擦的影响下,使用摩擦隔离阶段的简单模型,通过数值模拟和频域分析对实验研究进行了概括。基于观察到的不同性能指标(例如精度、速度)之间的权衡,提供了通用设计指南。

























 京公网安备 11010802027423号
京公网安备 11010802027423号