当前位置:
X-MOL 学术
›
Comput. Graph.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
An Unstructured Lumigraph Based Approach to the SVBRDF Estimation Problem
Computers & Graphics ( IF 2.5 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.cag.2020.09.013 Beatriz Trinchão Andrade , Benjamin Resch , Hendrik P.A. Lensch , Olga Regina Pereira Bellon , Luciano Silva
Computers & Graphics ( IF 2.5 ) Pub Date : 2020-12-01 , DOI: 10.1016/j.cag.2020.09.013 Beatriz Trinchão Andrade , Benjamin Resch , Hendrik P.A. Lensch , Olga Regina Pereira Bellon , Luciano Silva
|
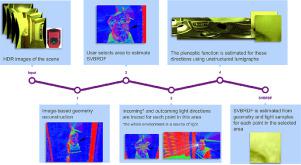
Abstract Appearance preservation aims to estimate reflectance functions to model the way real materials interact with light. These functions are especially useful in digital preservation of heritage and realistic rendering, as they reproduce the appearance of real materials in virtual scenes. This work proposes an image-based process that aims to preserve the appearance of surfaces whose reflectance properties are spatially variant. During image acquisition, this process considers the whole environment as a source of light over the area to be preserved and, assuming the environment is static, it does not require controlled environments. To achieve this goal, the scene geometry and relative camera positions are approximated from a set of HDR images taken inside the real scene, using a combination of structure from motion and multi-view stereo methods. Based on this data, a set of unstructured lumigraphs is traced, on-demand, inside the reconstructed scene. The color information retrieved from these lumigraphs is then used to estimate a linear combination of basis BRDFs for a grid of points in the surface area, defining thus its SVBRDF. This paper details the proposed method and presents the results obtained using real and synthetic settings. It shows that considering the whole environment as a source of light is a viable approach to obtain reliable results and to enable more flexible acquisition setups.
中文翻译:

一种基于非结构化 Lumigraph 的方法来解决 SVBRDF 估计问题
摘要 外观保留旨在估计反射函数以模拟真实材料与光的相互作用。这些功能在遗产的数字保存和逼真渲染中特别有用,因为它们在虚拟场景中再现真实材料的外观。这项工作提出了一种基于图像的过程,旨在保留反射特性在空间上变化的表面的外观。在图像采集期间,该过程将整个环境视为要保留区域上的光源,并且假设环境是静态的,则不需要受控环境。为了实现这个目标,场景几何和相对相机位置是从一组在真实场景中拍摄的 HDR 图像中近似得出的,使用来自运动的结构和多视图立体方法的组合。根据这些数据,在重建的场景中按需追踪一组非结构化的 lumigraphs。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。
更新日期:2020-12-01
中文翻译:
一种基于非结构化 Lumigraph 的方法来解决 SVBRDF 估计问题
摘要 外观保留旨在估计反射函数以模拟真实材料与光的相互作用。这些功能在遗产的数字保存和逼真渲染中特别有用,因为它们在虚拟场景中再现真实材料的外观。这项工作提出了一种基于图像的过程,旨在保留反射特性在空间上变化的表面的外观。在图像采集期间,该过程将整个环境视为要保留区域上的光源,并且假设环境是静态的,则不需要受控环境。为了实现这个目标,场景几何和相对相机位置是从一组在真实场景中拍摄的 HDR 图像中近似得出的,使用来自运动的结构和多视图立体方法的组合。根据这些数据,在重建的场景中按需追踪一组非结构化的 lumigraphs。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。然后使用从这些 lumigraphs 中检索到的颜色信息来估计表面区域中点网格的基础 BRDF 的线性组合,从而定义其 SVBRDF。本文详细介绍了所提出的方法,并介绍了使用真实和合成设置获得的结果。它表明,将整个环境视为光源是获得可靠结果和实现更灵活的采集设置的可行方法。

























 京公网安备 11010802027423号
京公网安备 11010802027423号