当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
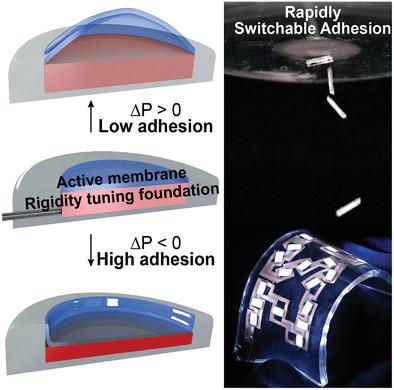
Active Membranes on Rigidity Tunable Foundations for Programmable, Rapidly Switchable Adhesion
Advanced Materials Technologies ( IF 6.8 ) Pub Date : 2020-09-21 , DOI: 10.1002/admt.202000676 Matthew D. Swift 1 , Cole B. Haverkamp 1 , Christopher J. Stabile 2 , Dohgyu Hwang 1 , Raymond H. Plaut 3 , Kevin T. Turner 2 , David A. Dillard 4 , Michael D. Bartlett 1
Advanced Materials Technologies ( IF 6.8 ) Pub Date : 2020-09-21 , DOI: 10.1002/admt.202000676 Matthew D. Swift 1 , Cole B. Haverkamp 1 , Christopher J. Stabile 2 , Dohgyu Hwang 1 , Raymond H. Plaut 3 , Kevin T. Turner 2 , David A. Dillard 4 , Michael D. Bartlett 1
Affiliation
|
Rapidly controlling and switching adhesion is necessary for applications in robotic gripping and locomotion, pick and place operations, and transfer printing. However, switchable adhesives often display a binary response (on or off) with a narrow adhesion range, lack post‐fabrication adhesion tunability, or switch slowly due to diffusion‐controlled processes. Here, pneumatically controlled shape and rigidity tuning is coupled to rapidly switch adhesion (≈0.1 s) across a wide range of programmable adhesion forces with measured switching ratios as high as 1300x. The switchable adhesion system introduces an active polydimethylsiloxane membrane supported on a compliant, foam foundation with pressure‐tunable rigidity where positive and negative pneumatic pressure synergistically control contact stiffness and geometry to activate and release adhesion. Energy‐based modeling and finite element computation demonstrate that high adhesion is achieved through a pressure‐dependent, nonlinear stiffness of the foundation, while an inflated shape at positive pressures enables easy release. This approach enables adhesion‐based gripping and material assembly, which is utilized to pick‐and‐release common objects, rough and porous materials, and arrays of elements with a greater than 14 000x range in mass. The robust assembly of diverse components (rigid, soft, flexible) is then demonstrated to create a soft and stretchable electronic device.
中文翻译:

刚性可调基础上的有源膜,用于可编程,快速切换的附着力
对于机器人抓取和移动,拾取和放置操作以及转移打印中的应用,必须快速控制和切换粘合力。但是,可切换的粘合剂通常表现出二元响应(开或关),粘合范围狭窄,缺乏制造后的粘合可调性,或者由于扩散控制的过程而转换缓慢。此处,气动控制的形状和刚度调整可在很大范围的可编程粘合力上快速切换粘合力(≈0.1s),测得的转换比高达1300 x。可切换的粘合系统引入了活性聚二甲基硅氧烷膜,该膜支撑在具有压力可调刚度的柔顺泡沫基础上,其中正负气压协同控制接触刚度和几何形状,以激活和释放粘合力。基于能量的建模和有限元计算表明,通过依赖于压力的基础非线性刚度可实现高附着力,而在正压力下的充气形状则易于释放。这种方法可实现基于粘合的抓取和材料组装,可用于拾取和释放常见物体,粗糙和多孔材料以及大于14 000 x的元素阵列质量范围。然后演示了各种组件(刚性,柔软,柔性)的坚固组装,从而创建了柔软且可拉伸的电子设备。
更新日期:2020-11-12
中文翻译:
刚性可调基础上的有源膜,用于可编程,快速切换的附着力
对于机器人抓取和移动,拾取和放置操作以及转移打印中的应用,必须快速控制和切换粘合力。但是,可切换的粘合剂通常表现出二元响应(开或关),粘合范围狭窄,缺乏制造后的粘合可调性,或者由于扩散控制的过程而转换缓慢。此处,气动控制的形状和刚度调整可在很大范围的可编程粘合力上快速切换粘合力(≈0.1s),测得的转换比高达1300 x。可切换的粘合系统引入了活性聚二甲基硅氧烷膜,该膜支撑在具有压力可调刚度的柔顺泡沫基础上,其中正负气压协同控制接触刚度和几何形状,以激活和释放粘合力。基于能量的建模和有限元计算表明,通过依赖于压力的基础非线性刚度可实现高附着力,而在正压力下的充气形状则易于释放。这种方法可实现基于粘合的抓取和材料组装,可用于拾取和释放常见物体,粗糙和多孔材料以及大于14 000 x的元素阵列质量范围。然后演示了各种组件(刚性,柔软,柔性)的坚固组装,从而创建了柔软且可拉伸的电子设备。

























 京公网安备 11010802027423号
京公网安备 11010802027423号