International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2020-09-18 , DOI: 10.1016/j.ijmachtools.2020.103625 Ming Deng , Huimin Li , Sitong Xiang , Puling Liu , Xiaobing Feng , Zhengchun Du , Jianguo Yang
|
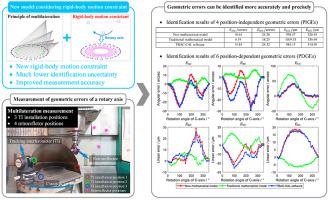
The measurement and identification of the four position-independent geometric errors (PIGEs) and six position-dependent geometric errors (PDGEs) in the rotary axis are necessary to reduce their contributions to the overall machining errors of a multi-axis machine tool. In this paper, a new geometric error identification method using a tracking interferometer is presented by considering the rigid-body motion constraint in multilateration. The rigid-body motion constraint is introduced to establish a new coordinate calculation model for the measurement points, and an identification process is presented to separately identify the PIGEs and PDGEs by deriving identification models based on established geometric error models. The main novelty of the proposed method lies in the consideration of the rigid-body motion constraint, which makes the identification more robust against random factors. Monte Carlo simulations and verifying experiments were performed for validation. The results show that the PIGEs and PDGEs in the rotary axis can be successfully separated and identified by the new method. Improved identification accuracy compared with the traditional method is achieved. The maximum angular positioning error was reduced by 84% after compensation. A lower uncertainty in the identified errors compared with those obtained by the traditional method and instrument software is achieved. The proposed method is validated by comparing the identification results with those obtained by the instrument software and laser interferometers.
中文翻译:
跟踪干涉仪的多轴机床旋转轴刚体运动约束几何误差识别
必须测量和识别旋转轴上的四个与位置无关的几何误差(PIGE)和六个与位置有关的几何误差(PDGE),以减少它们对多轴机床总加工误差的影响。提出了一种基于跟踪干涉仪的几何误差识别新方法,该方法考虑了多边刚体运动的约束。引入了刚体运动约束条件,为测量点建立了新的坐标计算模型,并提出了识别过程,通过基于已建立的几何误差模型推导识别模型来分别识别PIGE和PDGE。该方法的主要新颖之处在于考虑了刚体运动约束,这使得识别对随机因素的鲁棒性更高。进行了蒙特卡洛模拟和验证实验以进行验证。结果表明,采用该新方法可以成功地分离出旋转轴上的PIGE和PDGE。与传统方法相比,可以提高识别精度。补偿后,最大角度定位误差降低了84%。与传统方法和仪器软件相比,所识别错误的不确定性较低。通过将识别结果与仪器软件和激光干涉仪获得的识别结果进行比较,验证了该方法的有效性。结果表明,采用该新方法可以成功地分离出旋转轴上的PIGE和PDGE。与传统方法相比,可以提高识别精度。补偿后,最大角度定位误差降低了84%。与传统方法和仪器软件相比,所识别错误的不确定性较低。通过将识别结果与仪器软件和激光干涉仪获得的识别结果进行比较,验证了该方法的有效性。结果表明,采用该新方法可以成功地分离出旋转轴上的PIGE和PDGE。与传统方法相比,可以提高识别精度。补偿后,最大角度定位误差降低了84%。与传统方法和仪器软件相比,所识别错误的不确定性较低。通过将识别结果与仪器软件和激光干涉仪获得的识别结果进行比较,验证了该方法的有效性。与传统方法和仪器软件相比,所识别错误的不确定性较低。通过将识别结果与仪器软件和激光干涉仪获得的识别结果进行比较,验证了该方法的有效性。与传统方法和仪器软件相比,所识别错误的不确定性较低。通过将识别结果与仪器软件和激光干涉仪获得的识别结果进行比较,验证了该方法的有效性。
























 京公网安备 11010802027423号
京公网安备 11010802027423号