Medical & Biological Engineering & Computing ( IF 3.2 ) Pub Date : 2020-08-29 , DOI: 10.1007/s11517-020-02236-3 Xiaodong Zhang 1, 2 , Rui Li 3 , Hanzhe Li 1, 2 , Zhufeng Lu 1, 2 , Yong Hu 4 , Ahmad Bala Alhassan 1, 2
|
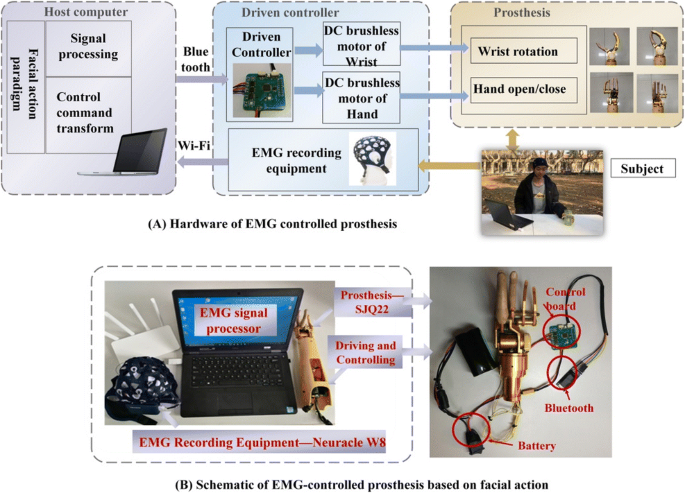
Individuals with severe tetraplegia frequently require to control their complex assistive devices using body movement with the remaining activity above the neck. Electromyography (EMG) signals from the contractions of facial muscles enable people to produce multiple command signals by conveying information about attempted movements. In this study, a novel EMG-controlled system based on facial actions was developed. The mechanism of different facial actions was processed using an EMG control model. Four asymmetric and symmetry actions were defined to control a two-degree-of-freedom (2-DOF) prosthesis. Both indoor and outdoor experiments were conducted to validate the feasibility of EMG-controlled prostheses based on facial action. The experimental results indicated that the new paradigm presented in this paper yields high performance and efficient control for prosthesis applications.
中文翻译:
基于面部动作的肌电图控制假肢的新方法。
患有严重四肢瘫痪的人经常需要使用身体运动来控制他们复杂的辅助设备,其余活动在颈部以上。来自面部肌肉收缩的肌电图 (EMG) 信号使人们能够通过传达有关尝试动作的信息来产生多个命令信号。在这项研究中,开发了一种基于面部动作的新型 EMG 控制系统。使用 EMG 控制模型处理不同面部动作的机制。定义了四个不对称和对称动作来控制二自由度 (2-DOF) 假肢。进行了室内和室外实验,以验证基于面部动作的 EMG 控制假肢的可行性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号