当前位置:
X-MOL 学术
›
Adv. Mater. Interfaces
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Highly Mobile Levitating Soft Actuator Driven by Multistimuli‐Responses
Advanced Materials Interfaces ( IF 5.4 ) Pub Date : 2020-09-09 , DOI: 10.1002/admi.202001051 Ji Hun Kim 1 , Jae‐Bum Pyo 1 , Taek‐Soo Kim 1
Advanced Materials Interfaces ( IF 5.4 ) Pub Date : 2020-09-09 , DOI: 10.1002/admi.202001051 Ji Hun Kim 1 , Jae‐Bum Pyo 1 , Taek‐Soo Kim 1
Affiliation
|
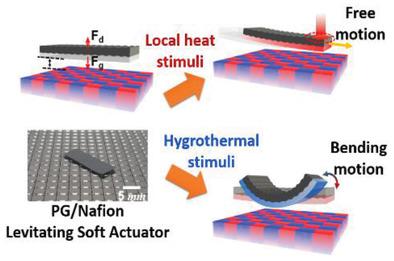
Soft actuators exhibit activeness and flexibility and are widely used as next‐generation intelligent devices. However, their locomotion depends on friction with contact surfaces that restrict their movement. To overcome this limitation, a noncontact‐type multiresponsive soft actuator that levitates in a magnetic field is proposed. This soft actuator can respond to humidity, heat, and diamagnetic repulsion force stimuli, resulting in high degrees of freedom and multiple motions. The soft actuator is fabricated by coating a highly hygroscopic membrane onto a diamagnetic graphite film, which enables the actuator to levitate in the magnetic field. Bending actuation is induced by the swelling mismatch between the two layers via the hygrothermal response. The translational force driven by local concentrated heating of the actuator leads to the realization of high‐speed linear and curvilinear motions. Frictionless rotational motion is also realized remotely with broad heating of an asymmetrically bent soft actuator, generating nonzero torque acting on the floating soft actuator. The proposed levitating soft actuators are applied to a fast and reliable capsule‐delivery gripper and a remotely controllable levitated motor. The soft actuator exhibits the potential to be applied in a wide range of applications, such as soft robotics and smart mechanical devices.
中文翻译:

多刺激响应驱动的高度移动的悬浮软执行器
软执行器具有主动性和灵活性,被广泛用作下一代智能设备。但是,它们的运动取决于与接触表面的摩擦,从而限制了它们的运动。为了克服这一限制,提出了一种悬浮在磁场中的非接触式多响应软执行器。这种软致动器可以响应湿度,热量和反磁性排斥力的刺激,从而产生高度的自由度和多种运动。通过将高度吸湿的膜涂覆在抗磁性石墨膜上来制造软促动器,这使促动器能够在磁场中悬浮。弯曲致动是由两层之间通过湿热响应引起的膨胀失配引起的。由执行器的局部集中加热驱动的平移力导致实现高速线性和曲线运动。通过广泛加热不对称弯曲的软致动器,还可以远程实现无摩擦旋转运动,从而产生作用于浮动软致动器的非零扭矩。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。
更新日期:2020-11-06
中文翻译:
多刺激响应驱动的高度移动的悬浮软执行器
软执行器具有主动性和灵活性,被广泛用作下一代智能设备。但是,它们的运动取决于与接触表面的摩擦,从而限制了它们的运动。为了克服这一限制,提出了一种悬浮在磁场中的非接触式多响应软执行器。这种软致动器可以响应湿度,热量和反磁性排斥力的刺激,从而产生高度的自由度和多种运动。通过将高度吸湿的膜涂覆在抗磁性石墨膜上来制造软促动器,这使促动器能够在磁场中悬浮。弯曲致动是由两层之间通过湿热响应引起的膨胀失配引起的。由执行器的局部集中加热驱动的平移力导致实现高速线性和曲线运动。通过广泛加热不对称弯曲的软致动器,还可以远程实现无摩擦旋转运动,从而产生作用于浮动软致动器的非零扭矩。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。拟议的悬浮软执行器应用于快速可靠的胶囊输送夹持器和可远程控制的悬浮电动机。软执行器具有潜在的广泛应用,例如软机器人和智能机械设备。


























 京公网安备 11010802027423号
京公网安备 11010802027423号