当前位置:
X-MOL 学术
›
Mech. Mach. Theory
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
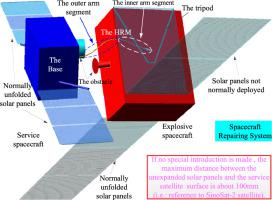
End-effector pose and arm-shape synchronous planning methods of a hyper-redundant manipulator for spacecraft repairing
Mechanism and Machine Theory ( IF 5.2 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.mechmachtheory.2020.104062 Jianqing Peng , Wenfu Xu , Tianliang Liu , Han Yuan , Bin Liang
Mechanism and Machine Theory ( IF 5.2 ) Pub Date : 2021-01-01 , DOI: 10.1016/j.mechmachtheory.2020.104062 Jianqing Peng , Wenfu Xu , Tianliang Liu , Han Yuan , Bin Liang
|
Abstract Compared with traditional industrial robots, a hyper-redundant manipulator (HRM) has better flexibility, especially in obstacle avoidance, narrow restricted space crossing and fault-tolerant control. However, mathematical modeling and trajectory planning methods for how a HRM can safety traverse these narrow-confined spaces are highly challenging. This paper proposes an end-effector pose and arm-shape synchronous planning method for a HRM passing through space narrow parallel slits based on extended Jacobian matrix redundancy decomposition(EJMRD). Firstly, for the limited confined space environment, the concept of end-effector poses and arm-shape synchronization constraint is introduced, and the overall framework of the method is given. Then, the kinematics model of the HRM is deduced, and the Jacobian matrix(JM) of this “hybrid active-passive driven-segmented linkage” structure is simplified. Further, the HRM is segmented by the dynamic segmentation method(DSM). Secondly, the arm-shape constraints of the inner arm segment(IAS) are integrated into the JM, and the extended Jacobian matrix(EJM) is established. In addition, the null-space of the EJM is redundantly decomposed to achieve obstacle avoidance of the outer arm segment(OAS). Finally, the Matlab-ADAMS co-simulation and experimental system is built. The above algorithm is verified by the simulation and experiment.
中文翻译:

用于航天器维修的超冗余机械臂末端执行器位姿和臂形同步规划方法
摘要 与传统工业机器人相比,超冗余机械手(HRM)具有更好的灵活性,尤其是在避障、狭窄受限空间穿越和容错控制方面。然而,关于 HRM 如何安全穿越这些狭窄空间的数学建模和轨迹规划方法极具挑战性。本文提出了一种基于扩展雅可比矩阵冗余分解(EJMRD)的HRM通过空间窄平行狭缝的末端执行器位姿和臂形同步规划方法。首先,针对有限的密闭空间环境,引入末端执行器位姿和臂形同步约束的概念,给出了该方法的总体框架。然后,推导出 HRM 的运动学模型,并且简化了这种“混合主动-被动驱动-分段连杆”结构的雅可比矩阵(JM)。此外,HRM 是由动态分割方法(DSM)分割的。其次,将内臂段(IAS)的臂形约束融入JM,建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。并建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。并建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。
更新日期:2021-01-01
中文翻译:
用于航天器维修的超冗余机械臂末端执行器位姿和臂形同步规划方法
摘要 与传统工业机器人相比,超冗余机械手(HRM)具有更好的灵活性,尤其是在避障、狭窄受限空间穿越和容错控制方面。然而,关于 HRM 如何安全穿越这些狭窄空间的数学建模和轨迹规划方法极具挑战性。本文提出了一种基于扩展雅可比矩阵冗余分解(EJMRD)的HRM通过空间窄平行狭缝的末端执行器位姿和臂形同步规划方法。首先,针对有限的密闭空间环境,引入末端执行器位姿和臂形同步约束的概念,给出了该方法的总体框架。然后,推导出 HRM 的运动学模型,并且简化了这种“混合主动-被动驱动-分段连杆”结构的雅可比矩阵(JM)。此外,HRM 是由动态分割方法(DSM)分割的。其次,将内臂段(IAS)的臂形约束融入JM,建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。并建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。并建立扩展雅可比矩阵(EJM)。此外,EJM的零空间被冗余分解以实现外臂段(OAS)的避障。最后,搭建了Matlab-ADAMS联合仿真与实验系统。通过仿真和实验验证了上述算法。

























 京公网安备 11010802027423号
京公网安备 11010802027423号