当前位置:
X-MOL 学术
›
Macromol. Rapid Commun.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Reconfigurable Soft Actuators with Multiple-Stimuli Responses.
Macromolecular Rapid Communications ( IF 4.6 ) Pub Date : 2020-08-07 , DOI: 10.1002/marc.202000313 Tonghui Zhao 1, 2, 3 , Wenchao Dou 2, 3 , Zhiming Hu 1, 2, 3 , Wenhao Hou 1, 2, 3 , Yirui Sun 2, 3 , Jiu-An Lv 2, 3
Macromolecular Rapid Communications ( IF 4.6 ) Pub Date : 2020-08-07 , DOI: 10.1002/marc.202000313 Tonghui Zhao 1, 2, 3 , Wenchao Dou 2, 3 , Zhiming Hu 1, 2, 3 , Wenhao Hou 1, 2, 3 , Yirui Sun 2, 3 , Jiu-An Lv 2, 3
Affiliation
|
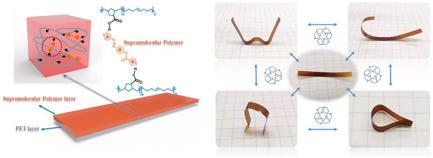
Multiple‐stimuli responsive soft actuators with tunable initial shapes would have substantial potential in broad technological applications, ranging from advanced sensors, smart robots to biomedical devices. However, existing soft actuators are often limited to single initial shape and are unable to reversibly reconfigure into desirable shapes, which severely restricts the multifunctions that can be integrated into one actuator. Here, a novel reconfigurable supramolecular polymer/polyethylene terephthalate (PET) bilayer actuator exhibiting multiple‐stimuli responses is presented. In this bilayer actuator, the supramolecular polymer layer constructed of poly(5‐Norbornene‐2‐carboxylic acid‐1,3‐cyclooctadiene) (PNCCO) and azopyridine derivative (PyAzoPy) via H‐bonds provides multiple‐stimuli responses: PyAzoPy offers light response and carboxylic groups in PNCCO endow the actuator with humidity response. Meanwhile thermoplastic PET layer enables the bilayer actuators to be reconfigured into various shapes by thermal stimuli. The rationally designed actuators exhibit versatile capabilities to reversibly reconfigure into a set of initial shapes and carry out multiple functions, such as photo‐driven “foldback‐clip” and Ω‐shaped crawling robots. In addition, bio‐inspired plants constructed by reconfiguration of such actuators demonstrate reversible multiple‐stimuli responses. It is anticipated that these novel actuators with highly tunable geometries and actuation modes would be useful to develop multifunctional devices capable of performing diverse tasks.
中文翻译:

具有多重刺激响应的可重配置软执行器。
具有可调初始形状的多刺激响应软执行器在从先进传感器,智能机器人到生物医学设备的广泛技术应用中具有巨大潜力。然而,现有的软致动器通常限于单个初始形状,并且不能可逆地重新配置为期望的形状,这严重限制了可以集成到一个致动器中的多功能。在这里,提出了一种新型的可重构的超分子聚合物/聚对苯二甲酸乙二酯(PET)双层执行器,表现出多重刺激响应。在该双层致动器中,由聚(5-降冰片烯-2-羧酸-1,3-环辛二烯)(PNCCO)和偶氮吡啶衍生物(PyAzoPy)构成的超分子聚合物层通过H键提供多重刺激响应:PyAzoPy提供光响应,PNCCO中的羧基使执行器具有湿度响应。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器而构建的具有生物启发性的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状,并可以执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器而构建的具有生物启发性的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。
更新日期:2020-09-08
中文翻译:
具有多重刺激响应的可重配置软执行器。
具有可调初始形状的多刺激响应软执行器在从先进传感器,智能机器人到生物医学设备的广泛技术应用中具有巨大潜力。然而,现有的软致动器通常限于单个初始形状,并且不能可逆地重新配置为期望的形状,这严重限制了可以集成到一个致动器中的多功能。在这里,提出了一种新型的可重构的超分子聚合物/聚对苯二甲酸乙二酯(PET)双层执行器,表现出多重刺激响应。在该双层致动器中,由聚(5-降冰片烯-2-羧酸-1,3-环辛二烯)(PNCCO)和偶氮吡啶衍生物(PyAzoPy)构成的超分子聚合物层通过H键提供多重刺激响应:PyAzoPy提供光响应,PNCCO中的羧基使执行器具有湿度响应。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器而构建的具有生物启发性的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。同时,热塑性PET层使得双层致动器能够通过热刺激被重新构造成各种形状。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状,并可以执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器而构建的具有生物启发性的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。合理设计的执行器具有多种功能,可以可逆地重新配置为一组初始形状并执行多种功能,例如照片驱动的“折返式夹子”和Ω形爬行机器人。此外,通过重新配置此类执行器构建的具有生物灵感的植物显示出可逆的多重刺激反应。可以预料,这些具有高度可调的几何形状和致动模式的新型致动器将对开发能够执行各种任务的多功能设备很有用。
























 京公网安备 11010802027423号
京公网安备 11010802027423号