当前位置:
X-MOL 学术
›
Biosyst. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Semantic interpretation and complexity reduction of 3D point clouds of vineyards
Biosystems Engineering ( IF 5.1 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.biosystemseng.2020.05.013 Lorenzo Comba , Shahzad Zaman , Alessandro Biglia , Davide Ricauda Aimonino , Fabrizio Dabbene , Paolo Gay
Biosystems Engineering ( IF 5.1 ) Pub Date : 2020-09-01 , DOI: 10.1016/j.biosystemseng.2020.05.013 Lorenzo Comba , Shahzad Zaman , Alessandro Biglia , Davide Ricauda Aimonino , Fabrizio Dabbene , Paolo Gay
|
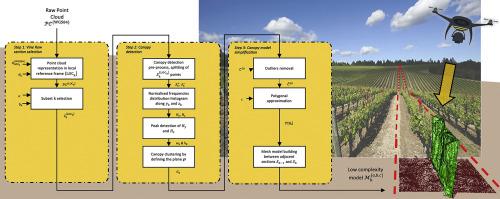
In precision agriculture, autonomous ground and aerial vehicles can lead to favourable improvements in field operations, extending crop scouting to large fields and performing field tasks in a timely and effective way. However, automated navigation and operations within a complex scenarios require specific and robust path planning and navigation control. Thus, in addition to proper knowledge of their instantaneous position, robotic vehicles and machines require an accurate spatial description of their environment. An innovative modelling framework is presented to semantically interpret 3D point clouds of vineyards and to generate low complexity 3D mesh models of vine rows. The proposed methodology, based on a combination of convex hull filtration and minimum area c-gon design, reduces the amount of instances required to describe the spatial layout and shape of vine canopies allowing the amount of data to be reduced without losing relevant crop shape information. The algorithm is not hindered by complex scenarios, such as non-linear vine rows, as it is able to automatically process non uniform vineyards. Results demonstrated a data reduction of about 98%; from the 500 Mb ha−1 required to store the original dataset to 7.6 Mb ha−1 for the low complexity 3D mesh. Reducing the amount of data is crucial to reducing computational times for large original datasets, thus enabling the exploitation of 3D point cloud information in real-time during field operations. When considering scenarios involving cooperating machines and robots, data reduction will allow rapid communication and data exchange between in field actors.
中文翻译:

葡萄园3D点云的语义解释和复杂度降低
在精准农业中,自主地面和飞行器可以促进田间作业的有利改进,将作物侦察扩展到大田,并及时有效地执行田间任务。然而,复杂场景中的自动化导航和操作需要特定且稳健的路径规划和导航控制。因此,除了正确了解其瞬时位置外,机器人车辆和机器还需要对其环境进行准确的空间描述。提出了一种创新的建模框架,以从语义上解释葡萄园的 3D 点云,并生成葡萄行的低复杂性 3D 网格模型。所提出的方法,基于凸包过滤和最小面积 c-gon 设计的组合,减少了描述藤蔓树冠的空间布局和形状所需的实例数量,从而在不丢失相关作物形状信息的情况下减少数据量。该算法不受复杂场景的阻碍,例如非线性葡萄树行,因为它能够自动处理非均匀葡萄园。结果表明数据减少了约 98%;从存储原始数据集所需的 500 Mb ha-1 到低复杂度 3D 网格的 7.6 Mb ha-1。减少数据量对于减少大型原始数据集的计算时间至关重要,从而能够在现场操作期间实时利用 3D 点云信息。在考虑涉及协作机器和机器人的场景时,数据简化将允许现场参与者之间的快速通信和数据交换。
更新日期:2020-09-01
中文翻译:
葡萄园3D点云的语义解释和复杂度降低
在精准农业中,自主地面和飞行器可以促进田间作业的有利改进,将作物侦察扩展到大田,并及时有效地执行田间任务。然而,复杂场景中的自动化导航和操作需要特定且稳健的路径规划和导航控制。因此,除了正确了解其瞬时位置外,机器人车辆和机器还需要对其环境进行准确的空间描述。提出了一种创新的建模框架,以从语义上解释葡萄园的 3D 点云,并生成葡萄行的低复杂性 3D 网格模型。所提出的方法,基于凸包过滤和最小面积 c-gon 设计的组合,减少了描述藤蔓树冠的空间布局和形状所需的实例数量,从而在不丢失相关作物形状信息的情况下减少数据量。该算法不受复杂场景的阻碍,例如非线性葡萄树行,因为它能够自动处理非均匀葡萄园。结果表明数据减少了约 98%;从存储原始数据集所需的 500 Mb ha-1 到低复杂度 3D 网格的 7.6 Mb ha-1。减少数据量对于减少大型原始数据集的计算时间至关重要,从而能够在现场操作期间实时利用 3D 点云信息。在考虑涉及协作机器和机器人的场景时,数据简化将允许现场参与者之间的快速通信和数据交换。


























 京公网安备 11010802027423号
京公网安备 11010802027423号