ISPRS Journal of Photogrammetry and Remote Sensing ( IF 12.7 ) Pub Date : 2020-07-09 , DOI: 10.1016/j.isprsjprs.2020.06.012 Ertugrul Bayraktar , Muhammed Enes Basarkan , Numan Celebi
|
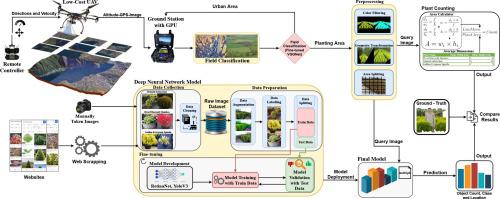
Object detection still keeps its role as one of the fundamental challenges within the computer vision territory. In particular, achieving satisfying results concerning object detection from outdoor images occupies a considerable space. In this study, in addition to comparing handcrafted feature detector/descriptor performance with deep learning methods over ornamental plant images at the outdoor, we propose a framework to improve the detection of these plants. Firstly, we take query images in the RGB format from the onboard UAV camera. Secondly, our model classifies the scene as a planting or an urban area. Thirdly, if the images are from planting area, thirdly, we filter the field according to the color and acquire only the green parts. Lastly, we feed the object detector model with the filtered area and obtain the category and localization of the plants as a result. In parallel, we also estimate the number of interested plants using the geometrical relations and predefined average plant size, then we verify the outputs of the object detector with this results. The conducted experiments show that deep learning based object detection methods overtake conventional feature detector/descriptor techniques in terms of accuracy, recall, precision, and sensitivity rates. The field classifier model, VGGNet, achieves a accuracy for this task, whilst YoloV3 achieves accuracy with IOU for object detection as the best method. The proposed framework also improves the overall performance of these algorithms by for accuracy and for IOU. By specifying the limits thoroughly and developing task-dependent approaches, we reveal the great potential of our framework plant detection and counting in the wild consisting of basic image preprocessing techniques, geometrical operations, and deep neural network.
中文翻译:
用于野外观赏植物检测和计数的低成本无人机框架
对象检测仍然是计算机视觉领域的基本挑战之一。特别地,获得关于从室外图像进行物体检测的令人满意的结果占据相当大的空间。在这项研究中,除了在户外对观赏植物图像上的手工特征检测器/描述符性能与深度学习方法进行比较外,我们提出了一个框架来改进这些植物的检测。首先,我们从机载无人机摄像机获取RGB格式的查询图像。其次,我们的模型将场景分类为种植区或市区。第三,如果图像来自种植区,第三,我们根据颜色过滤田野,仅获取绿色部分。最后,我们向对象检测器模型提供经过过滤的区域,从而获得植物的类别和位置。同时,我们还使用几何关系和预定义的平均植物大小来估计感兴趣植物的数量,然后使用此结果验证对象检测器的输出。进行的实验表明,基于深度学习的对象检测方法在准确性,查全率,准确性和敏感度方面超过了传统的特征检测器/描述符技术。字段分类器模型VGGNet实现了 进行的实验表明,基于深度学习的对象检测方法在准确性,查全率,准确性和敏感度方面超过了传统的特征检测器/描述符技术。字段分类器模型VGGNet实现了 进行的实验表明,基于深度学习的对象检测方法在准确性,查全率,准确性和敏感度方面超过了传统的特征检测器/描述符技术。字段分类器模型VGGNet实现了 这项任务的准确性,而YoloV3达到了 准确度 将IOU作为对象检测的最佳方法。所提出的框架还通过以下方式提高了这些算法的整体性能: 为了准确性和 借条。通过彻底指定限制并开发任务相关的方法,我们揭示了由基本图像预处理技术,几何运算和深度神经网络组成的框架植物检测和计数的巨大潜力。

























 京公网安备 11010802027423号
京公网安备 11010802027423号