当前位置:
X-MOL 学术
›
Adv. Funct. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite
Advanced Functional Materials ( IF 19.0 ) Pub Date : 2020-06-30 , DOI: 10.1002/adfm.202002510 Hyun‐Taek Lee 1, 2 , Florent Seichepine 1 , Guang‐Zhong Yang 1, 3
Advanced Functional Materials ( IF 19.0 ) Pub Date : 2020-06-30 , DOI: 10.1002/adfm.202002510 Hyun‐Taek Lee 1, 2 , Florent Seichepine 1 , Guang‐Zhong Yang 1, 3
Affiliation
|
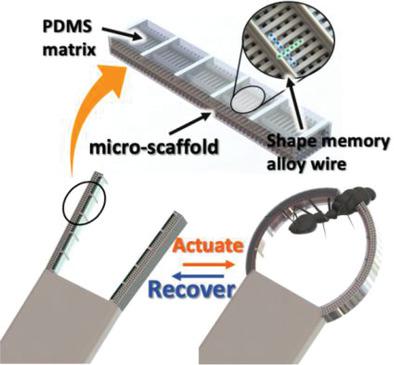
Recent advances in miniature robotics have brought promising improvements in performance by leveraging the latest developments in soft materials, new fabrication schemes, and continuum actuation. Such devices can be used for applications that need delicate manipulation such as microsurgery or investigation of small‐scale biological samples. The shape memory effect of certain alloys is one of the promising actuation mechanisms at small scales because of its high work density and simple actuation mechanism. However, for sub‐millimeter devices, it is difficult to achieve complex and large displacement with shape memory alloy actuators because of the limitation in the fabrication process. Herein, a fabrication scheme for miniaturized smart soft composite actuator is proposed by utilizing two‐photon polymerization. The morphing modes are varied by changing the direction of the scaffold lamination. In addition, the actuation is controlled via local resistive heating of a carbon nanotube layer deposited inside of the actuators. The proposed design can generate a 390 µN force and achieve a bending angle up to 80°. Applications of the actuators are demonstrated by grasping small and delicate objects with single and two finger devices.
中文翻译:

基于形状记忆合金智能软复合材料的微触头致动器
微型机器人技术的最新进展通过利用软材料的最新发展,新的制造方案和连续驱动而带来了令人鼓舞的性能改进。这种设备可用于需要精细操作的应用,例如显微外科手术或研究小型生物样品。某些合金的形状记忆效应由于其高的工作密度和简单的致动机制而成为小规模有希望的致动机制之一。但是,对于亚毫米级的设备,由于制造过程的限制,使用形状记忆合金致动器很难实现复杂而大的位移。本文提出了一种利用双光子聚合的小型智能软复合执行器的制造方案。通过改变支架层压的方向来改变变形模式。另外,通过沉积在致动器内部的碳纳米管层的局部电阻加热来控制致动。提出的设计可产生390 µN的力,并实现高达80°的弯曲角度。通过用单指和两指装置抓紧细小物体来演示执行器的应用。
更新日期:2020-08-19
中文翻译:
基于形状记忆合金智能软复合材料的微触头致动器
微型机器人技术的最新进展通过利用软材料的最新发展,新的制造方案和连续驱动而带来了令人鼓舞的性能改进。这种设备可用于需要精细操作的应用,例如显微外科手术或研究小型生物样品。某些合金的形状记忆效应由于其高的工作密度和简单的致动机制而成为小规模有希望的致动机制之一。但是,对于亚毫米级的设备,由于制造过程的限制,使用形状记忆合金致动器很难实现复杂而大的位移。本文提出了一种利用双光子聚合的小型智能软复合执行器的制造方案。通过改变支架层压的方向来改变变形模式。另外,通过沉积在致动器内部的碳纳米管层的局部电阻加热来控制致动。提出的设计可产生390 µN的力,并实现高达80°的弯曲角度。通过用单指和两指装置抓紧细小物体来演示执行器的应用。


























 京公网安备 11010802027423号
京公网安备 11010802027423号