当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Wireless Multistimulus‐Responsive Fabric‐Based Actuators for Soft Robotic, Human–Machine Interactive, and Wearable Applications
Advanced Materials Technologies ( IF 6.8 ) Pub Date : 2020-06-16 , DOI: 10.1002/admt.202000341 Rong Yin 1, 2 , Bao Yang 1 , Xujiao Ding 1 , Su Liu 1 , Wei Zeng 1 , Jun Li 1 , Su Yang 1 , Xiaoming Tao 1
Advanced Materials Technologies ( IF 6.8 ) Pub Date : 2020-06-16 , DOI: 10.1002/admt.202000341 Rong Yin 1, 2 , Bao Yang 1 , Xujiao Ding 1 , Su Liu 1 , Wei Zeng 1 , Jun Li 1 , Su Yang 1 , Xiaoming Tao 1
Affiliation
|
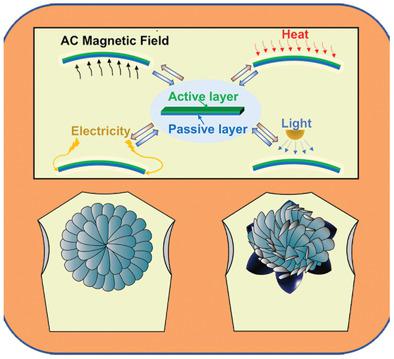
Soft actuators driven by pneumatic or electric means are heavy and clumsy with physical connections, which hinders their applications in human–machine interactive, wearable, and biomedical fields. Herewith, a light fabric bimorph actuator is reported that is driven wirelessly by optical, thermal, and magnetic energy sources. Being fabricated by laminating electrically conductive fabric and biaxially oriented polypropylene film, the actuators show a large bending curvature of 0.75 cm−1 with optical stimulus and 0.55 cm−1 with magnetic stimulus, a response time of 0.27 s with a bending angle of 100° to magnetic stimulus, more than twice faster than previously reported bimorph actuators. Their remarkable performance is attributed to the optimal structural design based on a verified Timoshenko model, electrothermal and optical properties of the conductive fabric coated by copper/nickel. It is greatly enhanced by the large difference of thermal expansion coefficients between the film and fabric. Various wireless controlled prototypes are demonstrated, including a soft gripper, soft kickers, and artificial blooming flowers, illustrating a new way to mass produce cost‐effective bimorph actuators via a simple, green, and fast approach for applications in robots, wearable, and functional textiles.
中文翻译:

适用于软机器人,人机交互和可穿戴应用的基于无线多刺激响应结构的执行器
由气动或电动方式驱动的软执行器笨重,笨拙且具有物理连接,这妨碍了它们在人机交互,可穿戴和生物医学领域的应用。据此,报道了一种由光,热和磁能源无线驱动的轻型织物双压电晶片致动器。通过层压导电织物和双轴取向的聚丙烯薄膜制成,执行器显示出0.75 cm -1的大弯曲曲率和0.55 cm -1的光学刺激使用磁刺激时,响应时间为0.27 s,对磁刺激的弯曲角度为100°,比以前报道的双压电晶片执行器快两倍以上。它们卓越的性能归因于基于经过验证的Timoshenko模型的最佳结构设计,铜/镍涂层导电织物的电热和光学性能。薄膜和织物之间的热膨胀系数之差大大提高了它的强度。演示了各种无线控制的原型,包括柔软的抓手,柔软的踢脚和人造盛开的花朵,展示了一种通过简单,绿色,快速的方法批量生产具有成本效益的双压电晶片执行器的新方法,可用于机器人,可穿戴和功能性机器人纺织品。
更新日期:2020-08-10
中文翻译:
适用于软机器人,人机交互和可穿戴应用的基于无线多刺激响应结构的执行器
由气动或电动方式驱动的软执行器笨重,笨拙且具有物理连接,这妨碍了它们在人机交互,可穿戴和生物医学领域的应用。据此,报道了一种由光,热和磁能源无线驱动的轻型织物双压电晶片致动器。通过层压导电织物和双轴取向的聚丙烯薄膜制成,执行器显示出0.75 cm -1的大弯曲曲率和0.55 cm -1的光学刺激使用磁刺激时,响应时间为0.27 s,对磁刺激的弯曲角度为100°,比以前报道的双压电晶片执行器快两倍以上。它们卓越的性能归因于基于经过验证的Timoshenko模型的最佳结构设计,铜/镍涂层导电织物的电热和光学性能。薄膜和织物之间的热膨胀系数之差大大提高了它的强度。演示了各种无线控制的原型,包括柔软的抓手,柔软的踢脚和人造盛开的花朵,展示了一种通过简单,绿色,快速的方法批量生产具有成本效益的双压电晶片执行器的新方法,可用于机器人,可穿戴和功能性机器人纺织品。


























 京公网安备 11010802027423号
京公网安备 11010802027423号