当前位置:
X-MOL 学术
›
Photogramm. Rec.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Hierarchical classification of pole‐like objects in mobile laser scanning point clouds
The Photogrammetric Record ( IF 2.4 ) Pub Date : 2020-01-10 , DOI: 10.1111/phor.12307 Rufei Liu 1 , Peng Wang 1 , Zhaojin Yan 2 , Xiushan Lu 1 , Minye Wang 1 , Jiayong Yu 1 , Maoyi Tian 1 , Xinjiang Ma 1
The Photogrammetric Record ( IF 2.4 ) Pub Date : 2020-01-10 , DOI: 10.1111/phor.12307 Rufei Liu 1 , Peng Wang 1 , Zhaojin Yan 2 , Xiushan Lu 1 , Minye Wang 1 , Jiayong Yu 1 , Maoyi Tian 1 , Xinjiang Ma 1
Affiliation
|
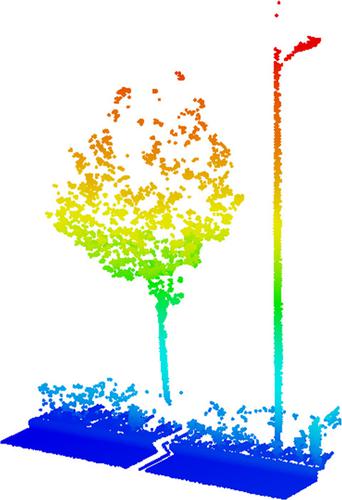
For the classification of pole‐like objects (trees, lamp posts, traffic lights and traffic signs) in mobile laser scanning (MLS) point clouds, a hierarchical classification method is proposed. The method consists of three major steps. (1) The objects’ cylindrical column sections are detected based on the characteristics of arc‐like points using RANSAC after denoising. (2) These detected objects are roughly classified into trees and man‐made poles based on the azimuthal coverage of point clouds above the cylindrical column. (3) Eigenvalue analysis and the principal direction of the upper pole projections are used to differentiate lamp posts, traffic lights and traffic signs. Experimental analysis shows that the method can effectively identify different types of pole‐like objects.
中文翻译:

移动激光扫描点云中类极物体的分层分类
为了对移动激光扫描(MLS)点云中的杆状物体(树,路灯柱,交通信号灯和交通标志)进行分类,提出了一种分层分类方法。该方法包括三个主要步骤。(1)去噪后,使用RANSAC根据圆弧状点的特征检测对象的圆柱截面。(2)根据圆柱柱上方点云的方位角覆盖范围,将这些检测到的物体大致分为树木和人造杆。(3)特征值分析和上杆投影的主要方向用于区分灯柱,交通信号灯和交通标志。实验分析表明,该方法可以有效地识别不同类型的极点物体。
更新日期:2020-01-10
中文翻译:
移动激光扫描点云中类极物体的分层分类
为了对移动激光扫描(MLS)点云中的杆状物体(树,路灯柱,交通信号灯和交通标志)进行分类,提出了一种分层分类方法。该方法包括三个主要步骤。(1)去噪后,使用RANSAC根据圆弧状点的特征检测对象的圆柱截面。(2)根据圆柱柱上方点云的方位角覆盖范围,将这些检测到的物体大致分为树木和人造杆。(3)特征值分析和上杆投影的主要方向用于区分灯柱,交通信号灯和交通标志。实验分析表明,该方法可以有效地识别不同类型的极点物体。

























 京公网安备 11010802027423号
京公网安备 11010802027423号